В этом уроке мы научимся управлять двигателем постоянного тока с помощью ПИД-регулятора через Интернет и Arduino Uno.
Комплектующие
Детали, используемые в этом проекте мы перечислим ниже.
- Двигатель постоянного тока с датчиком × 1
- Контроллер двигателя постоянного тока (PHPoC DC Motor Controller) × 1
- Шилд PHPoC WiFi Shield 2 для Arduino × 1
- Arduino Uno × 1
Как это устроено
Когда пользователь получает доступ к веб-странице PHPoC [WiFi] Shield из веб-браузера на смартфоне или ПК, между Arduino и веб-браузером будет установлено соединение WebSocket. Соединение WebSocket позволяет в реальном времени обмениваться данными между веб-браузером и Arduino без перезагрузки веб-страницы.
Когда пользователь поворачивает стрелку на веб-странице, угол поворота будет отправлен в Arduino. Arduino преобразует угол в эквивалентную позицию (единица измерения - импульс), а затем использует алгоритм ПИД (PID) для вращения двигателя постоянного тока на эквивалентную позицию.
Библиотека PID для Arduino можно скачать в нашем каталоге Библиотек по этой ссылке. Она также содержит функцию автонастройки для положения и скорости.
Расчет угол-позиция
Предположение:
- Разрешение инкрементного энкодера (количество на оборот): ENC_RESOLUTION
- Передаточное число: GEAR_RATIO
Сигнал от энкодера будет декодироваться контроллером двигателя постоянного тока. Контроллер двигателя постоянного тока действует как квадратурный декодер, который будет умножать в четыре раза (х4) число импульсов за оборот.
У нас есть:
- оборот <=> 360 градусов <=> ENC_RESOLUTION * GEAR_RATIO * 4
- угол <=> положение ( angle <=> position )
=> позиция = angle * ENC_RESOLUTION * GEAR_RATIO * 4/360
Мотор, который использовался, имеет:
- ENC_RESOLUTION = 13
- GEAR_RATIO = 100
- => position = angle * 13 * 100 * 4/360
(см. строку 68 кода Arduino ниже)
Соединение комплектующих
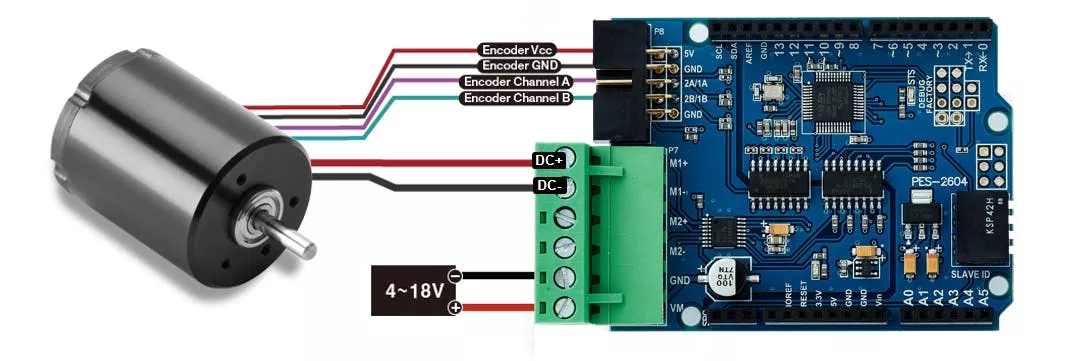
- Стек PHPoC Shield или PHPoC WiFi Shield на Arduino
- Контроллер стека постоянного тока PES-2604 на PHPoC Shield или PHPoC WiFi Shield
- Подключите клеммную колодку контроллера двигателя постоянного тока к двигателю постоянного тока и к источнику питания двигателя постоянного тока следующим образом:
- Клеммная колодка - провод VM <----> (+) - источник питания для двигателя постоянного тока
- Клеммная колодка - GND <----> (-) провод - источник питания для двигателя постоянного тока
- Клеммная колодка - провод M1 + <----> (+) - двигатель постоянного тока
- Клеммная колодка - провод M1- <----> (-) - двигатель постоянного тока
- (Необязательно) Подключите порт датчика контроллера двигателя постоянного тока к контакту датчика двигателя постоянного тока следующим образом:
- Энкодер 1 - 5 В <----> Vcc - Энкодер двигателя постоянного тока
- Энкодер 1 - GND <----> GND - Энкодер двигателя постоянного тока
- Энкодер 1 - 1A <----> A фаза - Энкодер двигателя постоянного тока
- Энкодер 1 - фаза 1B <----> B - Энкодер двигателя постоянного тока
- Кодер 1 расположен в верхнем ряду порта датчика. Более подробно здесь
Изображения для проекта
Ниже вы можете скачать архив с изображениями или скачать их. Они пригодятся позже.
Веб-интерфейс
Ниже файл remote_dc.php - это файл, который содержит веб-интерфейс пользователя. Он должен храниться в PHPoC [WiFi] Shield. Чтобы загрузить файл в PHPoC [WiFi] Shield, выполните следующие действия:
- Скопируйте приведенный ниже код и сохраните его в файле remote_dc.php.
- Установите PHPoC Debugger
- Подключите PHPoC Debugger к PHPoC [WiFi] Shield с помощью кабеля micro-USB согласно следующей инструкции по ссылке.
- Обратите внимание, что Arduino должен быть включен.
- Загрузите файл remote_dc.php в PHPoC [WiFi] Shield согласно этой инструкции по этой ссылке.
В коде используются изображения, которые вы можете скачать выше.
<!DOCTYPE html>
<html>
<head>
<title>PHPoC / <?echo system("uname -i")?></title>
<meta name="viewport" content="width=device-width, initial-scale=0.7">
<style>
body { text-align: center; background-color: whiite;}
canvas {
background: url(plate.png) no-repeat;
background-size: contain;}
}
</style>
<script>
var MIN_TOUCH_RADIUS = 20;
var MAX_TOUCH_RADIUS = 200;
var CANVAS_WIDTH, CANVAS_HEIGHT;
var PIVOT_X, PIVOT_Y;
var PLATE_WIDTH = 659.0, PLATE_HEIGHT = 569.0; // size of background image
var NEEDLE_WIDTH = 121, NEEDLE_HEIGHT = 492; // size of needle image
var RATIO;
var plateAngle = 0;
var needleImage = new Image();
var clickState = 0;
var lastAngle = 0;
var mouse_xyra = {x:0, y:0, r:0.0, a:0.0};
var ws;
needleImage.src = "needle.png";
function init() {
CANVAS_WIDTH = window.innerWidth - 50;
CANVAS_HEIGHT = window.innerHeight - 50;
if(CANVAS_WIDTH < CANVAS_HEIGHT)
CANVAS_HEIGHT = CANVAS_WIDTH;
else
CANVAS_WIDTH = CANVAS_HEIGHT;
PIVOT_X = CANVAS_WIDTH/2;
PIVOT_Y = CANVAS_HEIGHT/2;
RATIO = CANVAS_WIDTH / PLATE_WIDTH;
NEEDLE_WIDTH = Math.round(NEEDLE_WIDTH * RATIO);
NEEDLE_HEIGHT = Math.round(NEEDLE_HEIGHT * RATIO);
var canvas = document.getElementById("canvas");
canvas.width = CANVAS_WIDTH;
canvas.height = CANVAS_HEIGHT;
canvas.addEventListener("touchstart", mouse_down);
canvas.addEventListener("touchend", mouse_up);
canvas.addEventListener("touchmove", mouse_move);
canvas.addEventListener("mousedown", mouse_down);
canvas.addEventListener("mouseup", mouse_up);
canvas.addEventListener("mousemove", mouse_move);
var ctx = canvas.getContext("2d");
ctx.translate(PIVOT_X, PIVOT_Y);
rotate_plate(0);
ws = new WebSocket("ws://<?echo _SERVER("HTTP_HOST")?>/remote_dc", "text.phpoc");
document.getElementById("ws_state").innerHTML = "CONNECTING";
ws.onopen = function(){ document.getElementById("ws_state").innerHTML = "OPEN" };
ws.onclose = function(){ document.getElementById("ws_state").innerHTML = "CLOSED"};
ws.onerror = function(){ alert("websocket error " + this.url) };
ws.onmessage = ws_onmessage;
}
function ws_onmessage(e_msg) {
e_msg = e_msg || window.event; // MessageEvent
plateAngle = Number(e_msg.data);
rotate_plate(plateAngle);
}
function rotate_plate(angle) {
var canvas = document.getElementById("canvas");
var ctx = canvas.getContext("2d");
ctx.clearRect(-PIVOT_X, -PIVOT_Y, CANVAS_WIDTH, CANVAS_HEIGHT);
ctx.rotate(-angle / 180 * Math.PI);
ctx.drawImage(needleImage, 0, 0, needleImage.width, needleImage.height, -NEEDLE_WIDTH/2, -NEEDLE_HEIGHT/2, NEEDLE_WIDTH, NEEDLE_HEIGHT);
ctx.rotate(angle / 180 * Math.PI);
debug = document.getElementById("debug");
debug.innerHTML = plateAngle.toFixed(1);
}
function check_update_xyra(event, mouse_xyra) {
var x, y, r, a;
var min_r, max_r, width;
if(event.touches) {
var touches = event.touches;
x = (touches[0].pageX - touches[0].target.offsetLeft) - PIVOT_X;
y = PIVOT_Y - (touches[0].pageY - touches[0].target.offsetTop);
}
else {
x = event.offsetX - PIVOT_X;
y = PIVOT_Y - event.offsetY;
}
/* cartesian to polar coordinate conversion */
r = Math.sqrt(x * x + y * y);
a = Math.atan2(y, x);
mouse_xyra.x = x;
mouse_xyra.y = y;
mouse_xyra.r = r;
mouse_xyra.a = a;
if((r >= MIN_TOUCH_RADIUS) && (r <= MAX_TOUCH_RADIUS))
return true;
else
return false;
}
function mouse_down() {
if(event.touches && (event.touches.length > 1))
clickState = event.touches.length;
if(clickState > 1)
return;
if(check_update_xyra(event, mouse_xyra)) {
clickState = 1;
lastAngle = mouse_xyra.a / Math.PI * 180.0;
}
}
function mouse_up() {
clickState = 0;
}
function mouse_move() {
var angle, angleOffset;
if(event.touches && (event.touches.length > 1))
clickState = event.touches.length;
if(clickState != 1)
return;
if(!check_update_xyra(event, mouse_xyra)) {
clickState = 0;
} else {
angle = mouse_xyra.a / Math.PI * 180.0;
if(angle < 0.0)
angle = angle + 360.0;
angleOffset = angle - lastAngle;
lastAngle = angle;
if(angleOffset > 180.0)
angleOffset = -360.0 + angleOffset;
else
if(angleOffset < -180.0)
angleOffset = 360 + angleOffset;
plateAngle += angleOffset;
rotate_plate(plateAngle);
if(ws != null & ws.readyState == 1)
ws.send(plateAngle.toFixed(4) + "\r\n");
}
event.preventDefault();
}
window.onload = init;
</script>
</head>
<body>
<h2>
Arduino - DC Motor Position Control<br><br>
<canvas id="canvas"></canvas>
<p>
WebSocket : <span id="ws_state">null</span><br>
Angle : <span id="debug">0</span>
</p>
</h2>
</body>
</html>
Код Ардуино
Это код Arduino, который работает в бесконечном цикле.
#include <Phpoc.h>
#include <PhpocExpansion.h>
#include <Pid.h>
PhpocServer server(80);
DcMotorPID dcPid1(1, 1);
long targetPosition;
void setup(){
Serial.begin(9600);
while(!Serial)
;
//Phpoc.begin(PF_LOG_SPI | PF_LOG_NET);
Phpoc.begin();
server.beginWebSocket("remote_dc");
Serial.print("WebSocket server address : ");
Serial.println(Phpoc.localIP());
Expansion.begin(460800);
dcPid1.setPeriod(10000);
dcPid1.setEncoderPSR(64);
dcPid1.setDecay(0);
dcPid1.setFilterFrequency(5000);
dcPid1.setScaleFactor(5); // depending on motor, should test manually to have the best value
dcPid1.setIntegralLimit(-2000, 2000);
dcPid1.begin(PID_POSITION);
/*----------- check enc pol-------------- */
int pwm = 0; long pos = 0;
while(!pos)
{
pwm += 10;
dcPid1.setWidth(pwm);
pos = dcPid1.getEncoderPosition();
delay(1);
}
if(pos < 0)
dcPid1.setEncoderPolarity(-1);
dcPid1.setWidth(0);
//dcPid1.setGain(24.099171193725, 10.78947680748, 0.0617886);
/* PID auto-tuning */
dcPid1.beginTune();
while(!dcPid1.loopTune())
;
dcPid1.setEncoderPosition(0);
Serial.print(F("PID TUNED Kp: "));Serial.println(dcPid1.getKp());
Serial.print(F("PID TUNED Ki: "));Serial.println(dcPid1.getKi());
Serial.print(F("PID TUNED Kd: "));Serial.println(dcPid1.getKd());
}
void loop(){
PhpocClient client = server.available();
if(client) {
String data = client.readLine();
if(data) {
float targetAngle = data.toFloat();
targetPosition = (long)(targetAngle / 360.0 * (13 * 100 * 4));
}
}
long position = dcPid1.loop(targetPosition);
//Serial.print(targetPosition);
//Serial.print(" ");
//Serial.println(position);
}
Итоговый результат
На этом всё.