В этом небольшом уроке для начинающих мы создадим устройство-контроллер и руку робота для разных целей.
Что хотим получить
Мы в этом скромном уроке мы сделаем контроллер, который будет зеркально управлять рукой робота. Такие полезные технические решения могут применяться в различных областях и несут в себе огромную пользу.
Часто подобными устройствами пользуются, например, военные при разминировании различных взрывных устройств.
Также, вполне возможно, что такого рода проекты могут дать толчек в развитии обучения искусственного интеллекта, когда робот обучается на основе действий человека, а после может сам повторять и применять полученные навыки.
Комплектующие
Ниже перечислим комплектующие, используемые в проекте:
- Arduino UNO
- Сервоприводы MG995
- Сервоприводы DS3115
- Поворотные потенциометры, 10 кОм
Программное обеспечение:
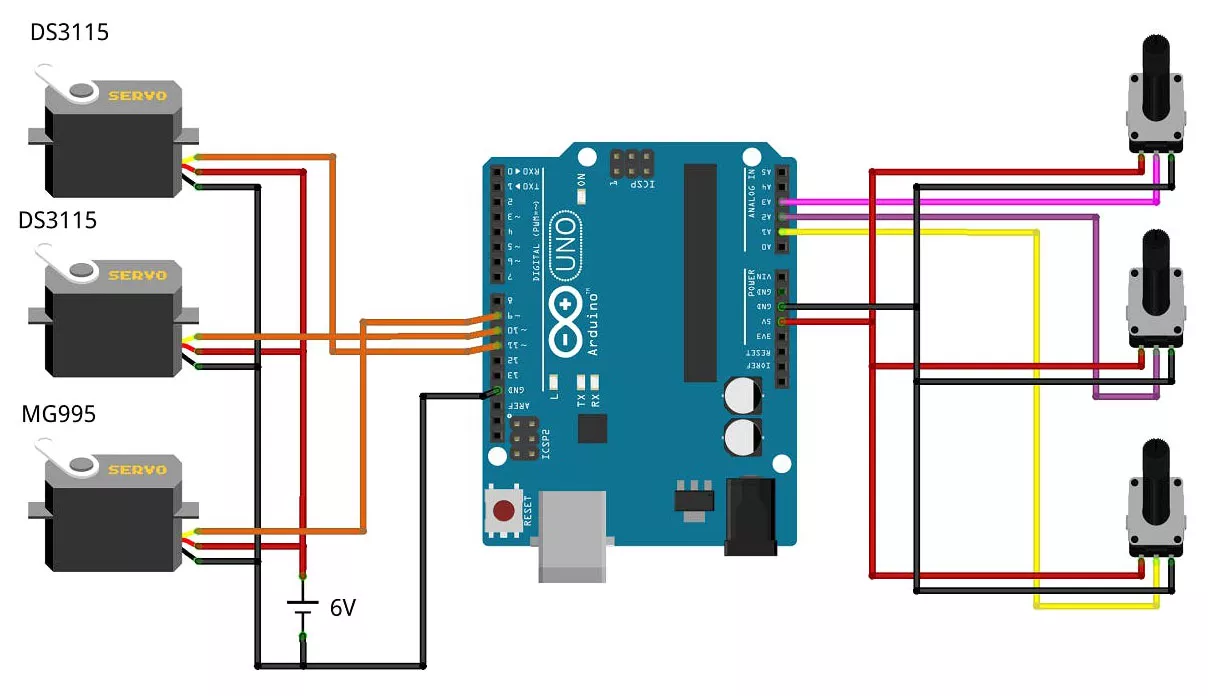
Рука робота использует три обычных сервопривода ШИМ, а каждый угол управляется переменным резистором. Два серводвигателя DS3115 используются в вертикальном направлении, а сервопривод MG995 используется при вращении.
Схема соединения
Соединяем все комплектующие согласно схеме ниже.
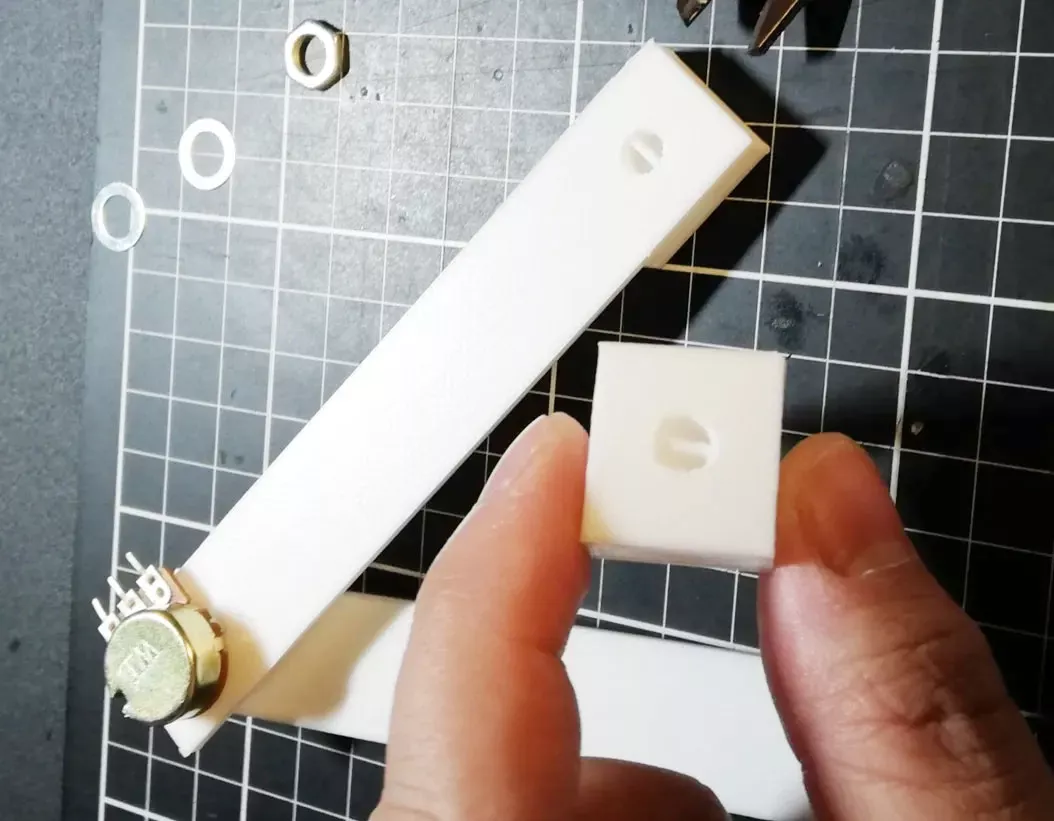
Делаем руку робота

Мы делаем корпус контроллера на 3D-принтере. Скачать файлы .stl можно в архиве ниже:

Предусмотрены отверстие и позиционирующее отверстие для завинчивания ручки поворотного потенциометра, а также выемка для вставки ручки.
Соберите вместе изготовленные детали и три поворотных потенциометра.
Поворотный потенциометр теперь расположен в том же направлении, что и ось вращения серводвигателя манипулятора робота.
Код Ардуино
Этот простой код ниже просто считывает значение вращающегося потенциометра с помощью аналогового пина, преобразует его в угол и передает на соответствующий сервопривод.
#include <Servo.h>
Servo myservo1, myservo2, myservo3;
float th1=90.0,th2=90.0,th3=90.0;
float val1, val2, val3;
void setup() {
Serial.begin(9600);
myservo1.attach(9, 500, 2420); // MG995
myservo2.attach(10, 820, 2140); // DS3115
myservo3.attach(11, 820, 2140); // DS3115
set_servo();
}
void loop() {
val1 = analogRead(A1);
val2 = analogRead(A2);
val3 = analogRead(A3);
th1 = map(val1, 170.0, 880.0, 0.0, 180.0);
if(th1 >= 180.0){
th1 = 180.0;
}else if(th1 <= 0.0){
th1 = 0.0;
}
th2 = map(val2, 150.0, 860.0, 0.0, 180.0);
if(th2 >= 180.0){
th2 = 180.0;
}else if(th2 <= 0.0){
th2 = 0.0;
}
th3 = map(val3, 860.0, 160.0, 0.0, 180.0);
if(th3 >= 180.0){
th3 = 180.0;
}else if(th3 <= 45.0){
th3 = 45.0;
}
set_servo();
}
void set_servo(){
myservo1.write(th1);
myservo2.write(th2);
myservo3.write(th3);
}
В завершение подключите поворотный потенциометр и подключите всё к Arduino.
На этом всё.