В очередном нашем уроке мы создадим управляемого жука Божью коровку, которого заставим двигаться с помощью команд со смартфона. В итоге мы получим устройство дистанционного управления с поддержкой Wi-Fi, которое обеспечивает как движение, так и простоту управления. Жук будет использовать смартфон на iOS, заблокированный в портретном режиме (мы тестировали только на устройствах iOS, см. раздел «Программное обеспечение» ниже), а для управления нужно будет просто перетаскивать красный курсор-кнопку.
Также мы включили исходный код в виде эскиза Arduino для Adafruit Feather Huzzah ESP8266 (плата от компании Adafruit), если вы захотите изменить его для использования с другими устройствами. Кроме того, вам понадобятся навыки пайки и паяльное оборудование, провод и все части, перечисленные на первом шаге, плюс система Arduino IDE с соответствующими библиотеками.
Игрушка разработана с использованием Autodesk Fusion 360, нарезана с использованием Cura 3.0.4 и напечатана (PLA) на Ultimaker 2+ Extended и Ultimaker 3 Extended.

Шаг 1: Комплектующие
Мы приложили файл PDF (в архиве), содержащий две таблицы. Первая таблица содержит список трехмерных печатных деталей с настройками и цветами, которые мы использовали. Вторая таблица содержит список приобретенных деталей.
Обратите внимание, что тело (либо «Body.3mf», либо «Body.stl») должно быть напечатано с помощью опоры из-за того, что 4 монтажные башни внутри корпуса на 2 мм выше, чем у корпуса. Также обратите внимание, что Cura 3.0.4 не будет размещать «Body.3mf» на строительной пластине, поэтому пришлось отключить настройку «Automatically drop models to the build plate», а затем вручную опустить корпус до тех пор, пока он не соприкоснется со сборной пластиной.
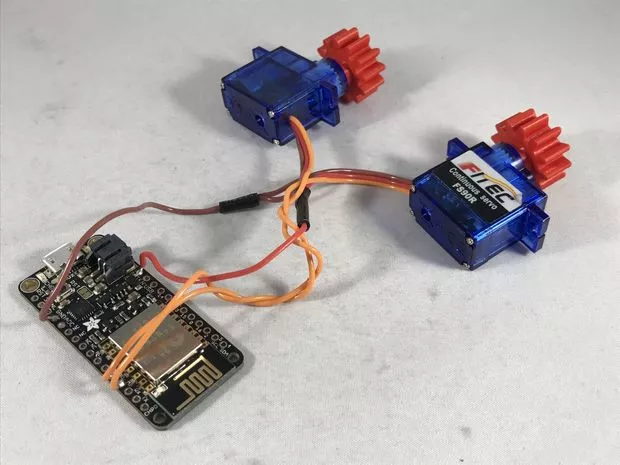
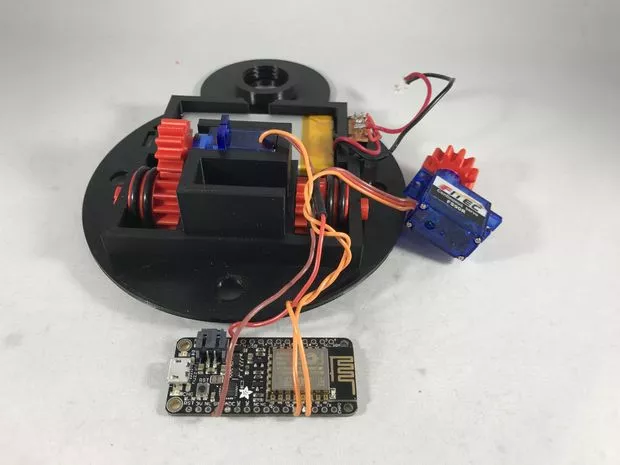
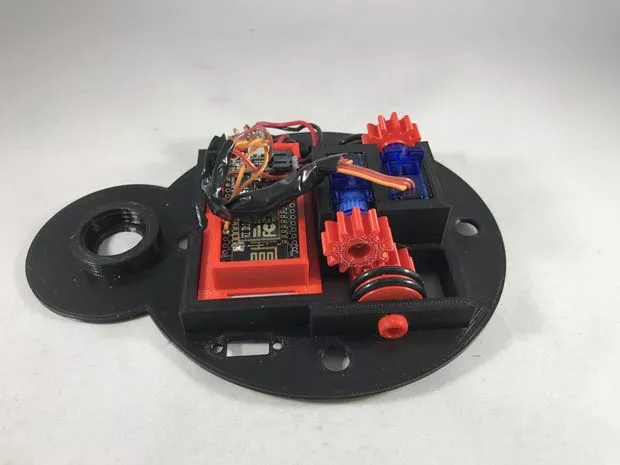
Шаг 2: Электроника
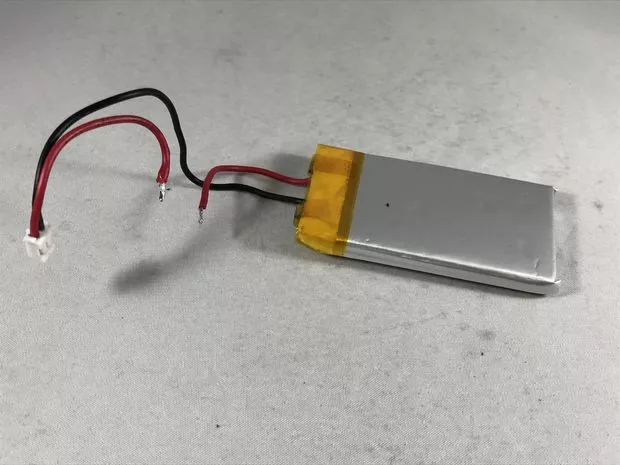
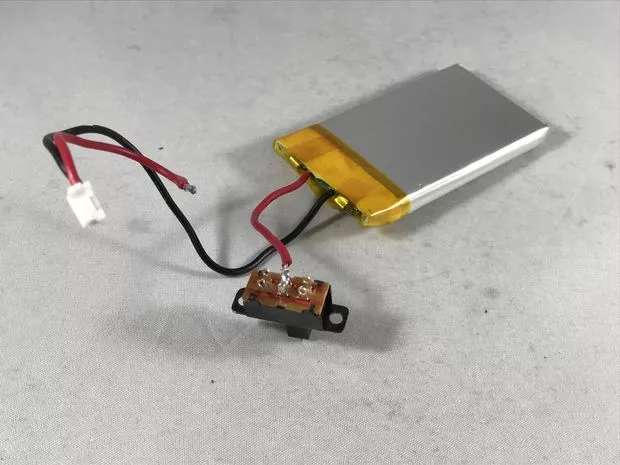
Осторожно отрежьте положительный (красный) провод на батарее посередине, а затем зачистите как показано на рисунке. Припаяйте часть красного провода, идущего от батареи, к центру двумя клеммами переключателя.
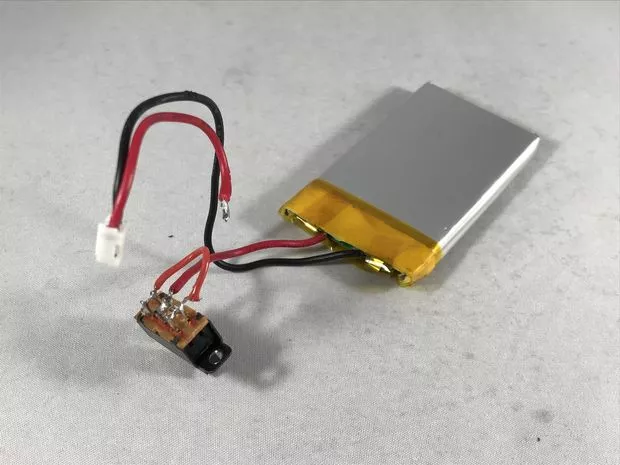
Припаяйте красный провод между внешними парами контактов переключателя, как показано на рисунке. Припаяйте часть красного провода, идущего от разъема к любому из двух внешних контактов переключателя.
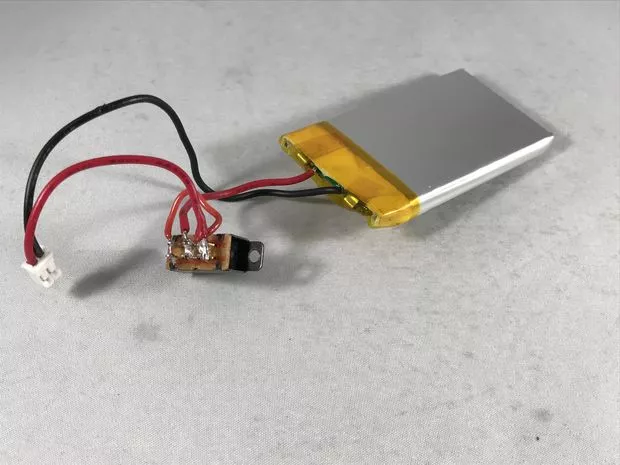
Для питания сервоприводов оба сервоположительных (красных) провода припаиваются к контакту «BAT» на лицевой панели платы Feather Huzzah, а оба серво-отрицательных (коричневых) провода припаиваются к контакту «GND» (земля).
Для управления сервоприводами левый сервосигнал (оранжевый) провод припаивается к контакту «12 / MISO» на лицевой панели Feather Huzzah, а провод сигнала с сервоприводом (оранжевый) прикрепляется к контакту «13 / MOSI».
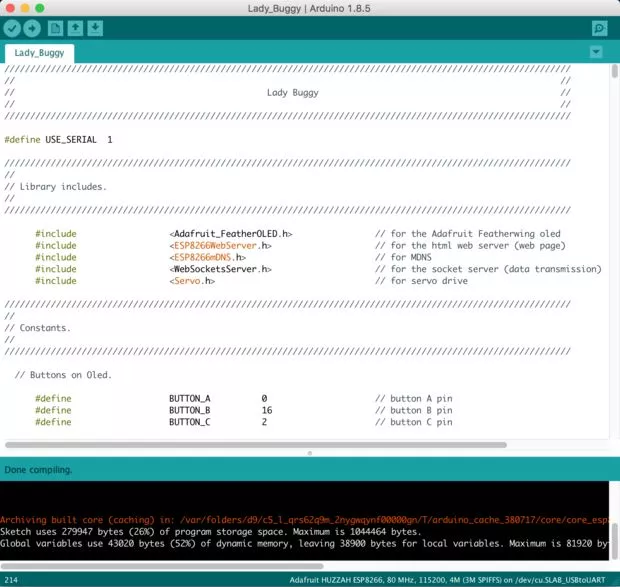
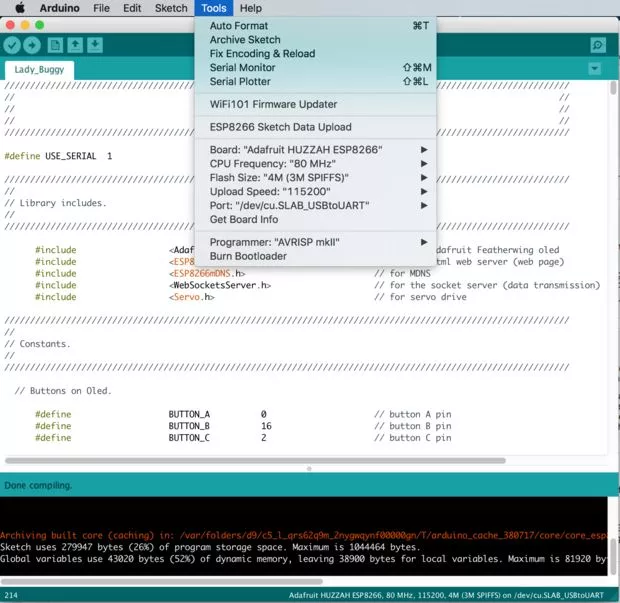
Шаг 3: Программное обеспечение
Наше устройство использует элемент html «canvas» для графики, а также события холста «touchstart», «touchmove» и «touchhend» для управления (см. Https://www.w3schools.com/graphics/canvas_intro.asp). Мы полагаем, что программное обеспечение должно работать на устройствах с сенсорным экраном отличных от iOS, но из-за нехватки времени не смогли подтвердить.
Мы разработали программное обеспечение для работы в беспроводных режимах AP (точка доступа) и станции (Wi-Fi-маршрутизатор). Если вы решили управлять Жуком в режиме AP, беспроводной маршрутизатор не требуется, так как ваше устройство iOS напрямую связывается с игрушкой. Чтобы работать в этом режиме, вы перейдете на настройки Wi-Fi на устройстве iOS и выберите сеть «LadyBuggy». После подключения откройте веб-браузер на устройстве iOS и введите IP-адрес «192.128.20.20» в поле url.
Если вы решите управлять игрушкой в режиме станции, вы будете общаться с ней через беспроводной маршрутизатор и, следовательно, вам нужно будет изменить программное обеспечение, чтобы установить «sSsid =» на ваш беспроводной маршрутизатор ssid и «sPassword =» к вашему паролю беспроводного маршрутизатора.
Вам нужно будет изменить эти параметры, используя редактор IDE Arduino, прежде чем компилировать и загружать его в вашу игрушку. Обратите внимание, что при использовании режима станции мы также включили поддержку MDNS, которая позволяет вам общаться с Жуком по ip-адресу ladybug.local, поэтому физический IP-адрес не требуется. Однако, если вы хотите использовать физический IP-адрес, назначенный вашим беспроводным маршрутизатором, вам нужно будет подключиться к серийному монитору Arduino при включении Жука (убедитесь, что «#define USE_SERIAL 1» находится в верхней части исходного кода файл перед компиляцией и отправкой кода), чтобы просмотреть IP-адрес, назначенный устройству вашим беспроводным маршрутизатором.
После того, как вы решите, в каком режиме вы будете управлять своей игрушкой и внесете необходимые изменения в программное обеспечение, соедините USB компьютера и micro usb на игрушке, используйте ползунковый переключатель для питания на Божьей коровке, затем скомпилируйте и загрузите программное обеспечение в неё.
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
// //
// Buggy //
// //
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
#define USE_SERIAL 1
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Library includes.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
#include <Adafruit_FeatherOLED.h> // for the Adafruit Featherwing oled
#include <ESP8266WebServer.h> // for the html web server (web page)
#include <ESP8266mDNS.h> // for MDNS
#include <WebSocketsServer.h> // for the socket server (data transmission)
#include <Servo.h> // for servo drive
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Constants.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Buttons on Oled.
#define BUTTON_A 0 // button A pin
#define BUTTON_B 16 // button B pin
#define BUTTON_C 2 // button C pin
// Oled display.
// Dimensions.
#define DISPLAY_HEIGHT 32 // height of afOled display in pixels
#define DISPLAY_WIDTH 128 // width of afOled display in pixels
// Font dimensions (estimated).
#define FONT_ONE_HEIGHT 8 // height of font one character
#define FONT_ONE_WIDTH 6 // width of font one character
#define FONT_TWO_HEIGHT 14 // height of font two character
#define FONT_TWO_WIDTH 12 // width of font two character
// Port numbers.
#define PORT_HTTP 80 // port number for http
#define PORT_WS 2205 // port number for socket
// Servo.
#define SERVO_OFF 90 // value to stop servo
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Variables.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
// Buttons.
static int nButtonA = 0; // button a pressed (1 = pressed)
static int nButtonB = 0; // button b pressed (1 = pressed)
static int nButtonC = 0; // button c pressed (1 = pressed)
// Oled.
Adafruit_FeatherOLED afOled = Adafruit_FeatherOLED(); // oled display
// Servos.
Servo ServoLeft; // left servo
Servo ServoRight; // right servo
// Wifi.
// Acccess point ssid.
IPAddress IpAddress(192,168,20,20); // access point ip address
IPAddress IpGateway(192,168,20,1); // access point gateway
IPAddress IpSubnet(255,255,255,0); // access point subnet mask
String sSsidLadyBuggygy = "LadyBuggygy"; // access point ssid
// Servers (http and sw).
int nX = 50; // servo x
int nY = 50; // servo y
ESP8266WebServer wsWebServer(PORT_HTTP); // html server
WebSocketsServer webSocket = WebSocketsServer(PORT_WS); // socket server
// Wifi router password, wifi router ssid and access point ssid.
String sPassword = "your_router_password"; // router and access point password
String sSsidAccessPoint = "LadyBuggy"; // access point ssid
String sSsidRouter = "your_router_ssid"; // router ssid
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Lady Buggy web page (client).
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
// The Lady Buggy web page string consists of both Javascript (for touch control, touch control graphics
// and data transmission), and html (for the web page).
String LadyBuggyWebPage=
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Javascript content of web page string.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
"<script type='text/javascript'>\n"
//
// Variables.
//
"var canvasLadyBuggy;\n"
"var canvasLadyBuggyHeight = 0;\n"
"var canvasLadyBuggyWidth = 0;\n"
"var contextLadyBuggy;\n"
"var nLadyBuggyDelay = 0;\n"
"var nLadyBuggyPort =" + String(PORT_WS) + ";\n"
"var nLadyBuggyX = 0;\n"
"var nLadyBuggyXN1 = -1;\n"
"var nLadyBuggyY = 0;\n"
"var nLadyBuggyYN1 = -1;\n"
"var touchlistLadyBuggy = [];\n"
"var wsLadyBuggy = new WebSocket('ws://' + location.hostname + ':' + nLadyBuggyPort + '/');\n"
//
// Utilities.
//
//
// sendLadyBuggyXY()
// Send the nLadyBuggyX and nLadyBuggyX values to the server.
// Entry : nothing
// Returns : nothing
//
// Notes :
//
// The server (the lady buggy itself) is expecting the header "zpllc" immediately
// followed by the x and y touch coordinates in the range of 0 through 99, with
// leading zeros if necessary.
"function sendLadyBuggyXY()\n"
"{\n"
// Convert x and y ints to strings.
"var stringX = String(nLadyBuggyX);\n"
"var stringY = String(nLadyBuggyY);\n"
// The server is expecting 2 digit values for x and y (00 through 99),
// so add leading zero(s) to the strings as required.
"while(stringX.length < 2)\n"
"stringX = '0' + stringX;\n"
"while(stringY.length < 2)\n"
"stringY = '0' + stringY;\n"
// Combine the strings with the server validation header.
//
// Notes:
//
// Again, the server is expecting an ascii string formatted as follows:
//
// "zpllcXXYY"
//
// where:
//
// "zpllc": is a header for server validation of the message string,
// "XX" : is the x value,
// "YY" : is the y value.
//
"stringX = 'zpllc' + stringX + stringY;\n"
// Send the result to the server.
"wsLadyBuggy.send(stringX);\n"
"}\n"
//
// drawLadyBuggyTouchImage(x, y)
// Draw the touch image on the canvas.
// Entry : x and y location of where to draw the image
// Returns : nothing
//
"function drawLadyBuggyTouchImage(x, y)\n"
"{\n"
// Start a drawing path.
"contextLadyBuggy.beginPath();\n"
// Draw a circle.
"contextLadyBuggy.arc(x, y, 40, 0, 2*Math.PI, true);\n"
"contextLadyBuggy.fillStyle = 'rgba(200, 0, 0, 0.2)';\n"
"contextLadyBuggy.fill();\n"
"contextLadyBuggy.lineWidth = 2.0;\n"
"contextLadyBuggy.strokeStyle = 'rgba(200, 0, 0, 0.8)';\n"
// Present the drawing path.
"contextLadyBuggy.stroke();\n"
"}\n"
//
// onloadLadyBuggy()
// Called by the html code when the web page is loaded.
// Entry : nothing
// Returns : nothing
//
"function onloadLadyBuggy()\n"
"{\n"
// Obtain the canvas from the html portion of the web page.
"canvasLadyBuggy = document.getElementById('canvasLadyBuggy');\n"
// Obtain a drawing context for the canvas.
"contextLadyBuggy = canvasLadyBuggy.getContext('2d');\n"
// Initialize the canvas.
"canvasLadyBuggyWidth = window.innerWidth;\n"
"canvasLadyBuggyHeight = window.innerHeight;\n"
"canvasLadyBuggy.style.width = canvasLadyBuggyWidth +'px';\n"
"canvasLadyBuggy.style.height = canvasLadyBuggyHeight + 'px';\n"
"canvasLadyBuggy.width = canvasLadyBuggyWidth;\n"
"canvasLadyBuggy.height = canvasLadyBuggyHeight;\n"
// Draw the initial touch image.
"drawLadyBuggyTouchImage(window.innerWidth / 2, window.innerHeight / 2);\n"
// Create a function for the "touchstart" event.
"canvasLadyBuggy.addEventListener('touchstart', function(event)\n"
"{\n"
// Obtain list of touch points (we only use the first one in Lady Buggy).
"touchlistLadyBuggy = event.touches;\n"
// Check for existance of a touch point.
"if(touchlistLadyBuggy.length)\n"
"{\n"
// Have a touchpoint, update x.
"nLadyBuggyX = parseInt((100 * touchlistLadyBuggy[0].pageX) / canvasLadyBuggyWidth);\n"
"nLadyBuggyX = (nLadyBuggyX > 0) ? (nLadyBuggyX < 99) ? nLadyBuggyX : 99 : 0;\n"
// Update y.
"nLadyBuggyY = parseInt((100 * touchlistLadyBuggy[0].pageY) / canvasLadyBuggyHeight);\n"
"nLadyBuggyY = (nLadyBuggyY > 0) ? (nLadyBuggyY < 99) ? nLadyBuggyY : 99 : 0;\n"
// Send x and y position data to the server.
// Update n-1 values.
"nLadyBuggyXN1 = nLadyBuggyX;\n"
"nLadyBuggyYN1 = nLadyBuggyY;\n"
"nLadyBuggyDelay = 8;\n"
// Send x, y.
"sendLadyBuggyXY();\n"
// Update the touch image position.
"contextLadyBuggy.clearRect(0, 0, canvasLadyBuggyWidth, canvasLadyBuggyHeight);\n"
"drawLadyBuggyTouchImage(touchlistLadyBuggy[0].pageX, touchlistLadyBuggy[0].pageY);\n"
"}\n"
"});\n"
// Create a function for the "touchmove" event.
"canvasLadyBuggy.addEventListener('touchmove', function(event)\n"
"{\n"
// No scrolling during touch moves.
"event.preventDefault();\n"
// Obtain list of touch points.
"touchlistLadyBuggy = event.touches;\n"
// Check for existance of a touch point.
"if(touchlistLadyBuggy.length)\n"
"{\n"
// Have a touchpoint, update x.
"nLadyBuggyX = parseInt((100 * touchlistLadyBuggy[0].pageX) / canvasLadyBuggyWidth);\n"
"nLadyBuggyX = (nLadyBuggyX > 0) ? (nLadyBuggyX < 99) ? nLadyBuggyX : 99 : 0;\n"
// Update y.
"nLadyBuggyY = parseInt((100 * touchlistLadyBuggy[0].pageY) / canvasLadyBuggyHeight);\n"
"nLadyBuggyY = (nLadyBuggyY > 0) ? (nLadyBuggyY < 99) ? nLadyBuggyY : 99 : 0;\n"
// Send x and y position data to the server.
//
// Notes:
//
// In this application, there is no need to continuously send data to the server,
// so nLadyBuggyDelay is incorporated to send data to the server every 16 passes if
// either the x or y values have changed.
"if(((nLadyBuggyXN1 != nLadyBuggyX) || (nLadyBuggyYN1 != nLadyBuggyY)) && ((nLadyBuggyDelay --) <= 0))\n"
"{\n"
// x or y has changed and delay is up, update n-1 values and reset delay.
"nLadyBuggyXN1 = nLadyBuggyX;\n"
"nLadyBuggyYN1 = nLadyBuggyY;\n"
"nLadyBuggyDelay = 16;\n"
// Send x, y.
"sendLadyBuggyXY();\n"
"}\n"
// Update the touch image position.
"contextLadyBuggy.clearRect(0, 0, canvasLadyBuggyWidth, canvasLadyBuggyHeight);\n"
"drawLadyBuggyTouchImage(touchlistLadyBuggy[0].pageX, touchlistLadyBuggy[0].pageY);\n"
"}\n"
"});\n"
// Create a function for the "touchend" event.
"canvasLadyBuggy.addEventListener('touchend', function()\n"
"{\n"
// At the end of the touch, return to center thus stopping Lady Buggy.
"nLadyBuggyX = 50;\n"
"nLadyBuggyY = 50;\n"
// Send x, y.
"sendLadyBuggyXY();"
// Draw the touch image.
"contextLadyBuggy.clearRect(0, 0, canvasLadyBuggyWidth, canvasLadyBuggyHeight);\n"
"drawLadyBuggyTouchImage(canvasLadyBuggyWidth / 2, canvasLadyBuggyHeight / 2);\n"
"});\n"
"};\n"
"</script>\n"
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// HTML content of web page.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
"<!DOCTYPE html>\n"
"<html>\n"
"<head>\n"
"<title>Lady Buggy</title>\n"
"<meta name='viewport' content='width=device-width, user-scalable=no'>\n"
"<style type='text/css'>\n"
"body { margin: 0px; overflow: hidden; }\n"
"canvas { border: none; }\n"
"</style>\n"
"</head>\n"
"<body onload='onloadLadyBuggy()'>\n"
"<canvas id='canvasLadyBuggy' width='300' height='300' style='top:0px; left:0px; width: 300px; height: 300px;'></canvas>\n"
"</body>\n"
"</html>"
;
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Lady Buggy setup.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
void setup()
{
// Serial.
//
// Serial is only necessary for debugging.
#if USE_SERIAL
Serial.begin(115200);
while(!Serial){};
#endif
// Buttons (the buttons are located on the Adafruit afOled module).
pinMode(BUTTON_A, INPUT_PULLUP);
pinMode(BUTTON_B, INPUT_PULLUP);
pinMode(BUTTON_C, INPUT_PULLUP);
// Display.
afOled.init();
afOled.clearDisplay();
// Wifi.
// Set the wifi mode to access point and station mode.
WiFi.mode(WIFI_AP_STA);
// Set the station mode ssid and password.
WiFi.begin(sSsidRouter.c_str(), sPassword.c_str());
// Set the access point ip address, gateway and subnet.
WiFi.softAPConfig(IpAddress, IpGateway, IpSubnet);
// Set the access point ssid and password.
WiFi.softAP(sSsidAccessPoint.c_str(), sPassword.c_str());
// Server.
// Root is the webpage.
//
// "/" is sent from the http client and is a request for a complete webpage refresh.
wsWebServer.on("/", []()
{
wsWebServer.send(200, "text/html", LadyBuggyWebPage);
});
// Start the server.
wsWebServer.begin();
// Start the socket.
webSocket.begin();
webSocket.onEvent(LadyBuggySocketEvent);
// Add http and ws services to MDNS.
//
// Notes:
//
// 1) "http" service is for the html portion of the web page and is serviced on port number PORT_HTTP.
// 2) "ws" service is for the javascript socket portion of the web page and is serviced on port nomber PORT_WS.
MDNS.begin("LadyBuggy", WiFi.localIP());
MDNS.addService("http", "tcp", PORT_HTTP);
MDNS.addService("ws", "tcp", PORT_WS);
// Servos.
ServoLeft.write(SERVO_OFF);
ServoLeft.attach(12);
ServoRight.write(SERVO_OFF);
ServoRight.attach(13);
// Send the ip address to the serial monitor.
#if USE_SERIAL
Serial.print("Lady Buggy: waiting for wifi connect");
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(".");
}
Serial.println("\nLady Buggy: wifi connect with IP Address : " + WiFi.localIP().toString());
#endif
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// Lady Buggy Main loop.
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
void loop()
{
// Update server.
wsWebServer.handleClient();
// Update socket.
webSocket.loop();
// Update oled display.
LadyBuggyDisplay();
// Update buttons.
LadyBuggyButtons();
// Give up some time.
delay(20);
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// LadyBuggyButtons
// Update and process push buttons.
// Entry : nothing
// Returns : nothing
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
void LadyBuggyButtons()
{
// Variables.
static int nButtonAN1 = 1;
static int nButtonBN1 = 1;
static int nButtonCN1 = 1;
// Read buttons.
int nDigitalReadA = digitalRead(BUTTON_A);
int nDigitalReadB = digitalRead(BUTTON_B);
int nDigitalReadC = digitalRead(BUTTON_C);
// Process button A.
if(nDigitalReadA != nButtonAN1)
{
// State changed.
if(nButtonAN1)
{
// Pressed.
nButtonAN1 = 0;
nButtonA = 1;
}
else
{
// Released.
nButtonAN1 = 1;
nButtonA = 0;
}
}
// Process button B.
if(nDigitalReadB != nButtonBN1)
{
// State changed.
if(nButtonBN1)
{
// Pressed.
nButtonBN1 = 0;
nButtonB = 1;
}
else
{
// Released.
nButtonBN1 = 1;
nButtonB = 0;
}
}
// Process button C.
if(nDigitalReadC != nButtonCN1)
{
// State changed.
if(nButtonCN1)
{
// Pressed.
nButtonCN1 = 0;
nButtonC = 1;
}
else
{
// Released.
nButtonCN1 = 1;
nButtonC = 0;
}
}
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// LadyBuggyDisplay
// Update afOled display.
// Entry : nothing
// Returns : nothing
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// LadyBuggyDisplay
// Update the oled display
// Entry : nothing
// Returns : nothing
//
void LadyBuggyDisplay()
{
// Oled display.
afOled.clearDisplay();
String sString = WiFi.localIP().toString();
afOled.setTextSize(1);
afOled.setCursor((DISPLAY_WIDTH / 2) - ((sString.length() * FONT_ONE_WIDTH) / 2), 0);
afOled.print(sString);
sString = String(String(nButtonA) + ", " + String(nButtonB) + ", " + String(nButtonC));
afOled.setTextSize(1);
afOled.setCursor((DISPLAY_WIDTH / 2) - ((sString.length() * FONT_ONE_WIDTH) / 2), (DISPLAY_HEIGHT / 2) - (FONT_ONE_HEIGHT / 2));
afOled.print(sString);
sString = String(String((100 * (nX - 50)) / 50) + ", " + String((100 * (50 - nY)) / 50));
afOled.setTextSize(1);
afOled.setCursor((DISPLAY_WIDTH / 2) - ((sString.length() * FONT_ONE_WIDTH) / 2), DISPLAY_HEIGHT - FONT_ONE_HEIGHT);
afOled.print(sString);
// Present the display.
afOled.display();
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
//
// LadyBuggySocketEvent
// Process socket client events.
// Entry : client number
// : event type
// : pointer to message received from client
// : length of message received from client
// Returns : nothing
//
//////////////////////////////////////////////////////////////////////////////////////////////////////////////
void LadyBuggySocketEvent(unsigned char ClientNumber, WStype_t EventType, unsigned char * Message, int MessageLength)
{
// Process event type.
switch(EventType)
{
// Process event type connect.
case WStype_CONNECTED:
{
// Display connected client ip and url.
IPAddress ip = webSocket.remoteIP(ClientNumber);
#if USE_SERIAL
Serial.printf("Client #%u connect :\n", ClientNumber);
Serial.printf(" ip address : %d.%d.%d.%d\n", ip[0], ip[1], ip[2], ip[3]);
// Serial.printf(" url : %s\n", Message);
#endif
// Send a message to client
webSocket.sendTXT(ClientNumber, "You are connected.");
}
break;
// Process event type client text.
case WStype_TEXT:
{
// Validate the incoming Lady Buggy data string by checking the first 5 characters for "zpllc".
if((Message[0] == 'z') &&
(Message[1] == 'p') &&
(Message[2] == 'l') &&
(Message[3] == 'l') &&
(Message[4] == 'c'))
{
// Valid Lady Buggy header, convert incoming Lady Buggy data string to x and y.
// Convert the string to double.
double data = strtod((const char *) & Message[5], NULL);
// Derive and limit the x component.
nX = (int)data / 100;
nX = (nX > 0) ? (nX < 99) ? nX : 99 : 0;
// Derive and limit the y component.
nY = (int)data % 100;
nY = (nY > 0) ? (nY < 99) ? nY : 99 : 0;
// Set the servo values based on the x and y components.
int nServoLeftScale = (((nX < 50) ? nX : 50) * 100) / 50;
int nServoRightScale = (((nX > 50) ? (100 - nX) : 50) * 100) / 50;
ServoLeft.write(SERVO_OFF + ((nServoLeftScale * (nY - 50)) / 100));
ServoRight.write(SERVO_OFF - ((nServoRightScale * (nY - 50)) / 100));
// Send x and y components to the serial monitor.
#if USE_SERIAL
Serial.printf("Client #%u sent: x = %02d, y = %02d\n", ClientNumber, nX, nY);
#endif
}
else
{
// Invalid Lady Buggy header, send data to serial monitor.
#if USE_SERIAL
Serial.printf("Client #%u invalid data: %s\n", ClientNumber, Message);
#endif
}
}
break;
// Process event type disconnect.
case WStype_DISCONNECTED:
{
// Process client disconnect.
#if USE_SERIAL
Serial.printf("Client #%u disconnected.\n", ClientNumber);
#endif
}
break;
}
}
Шаг 4: Сборка



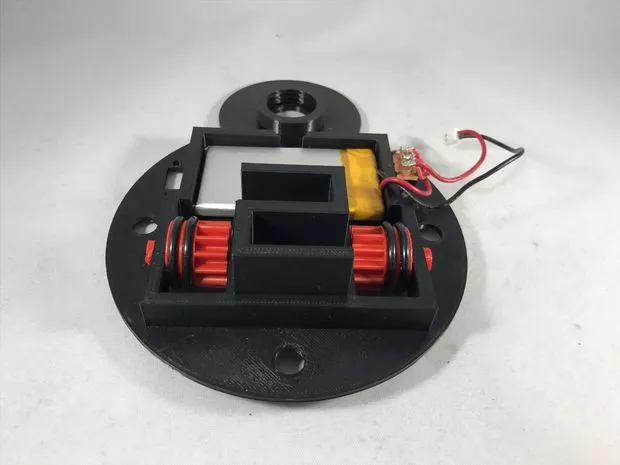
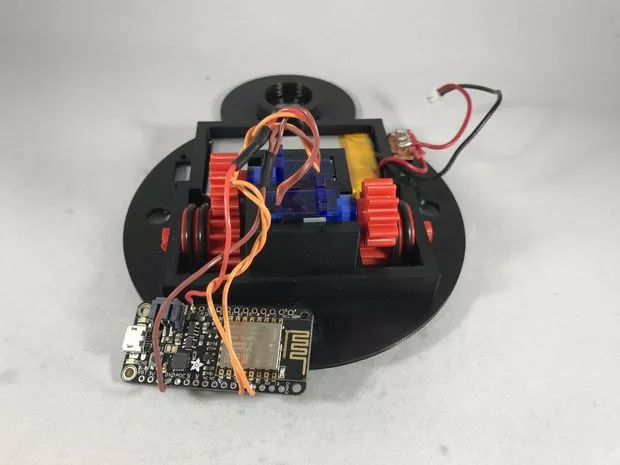

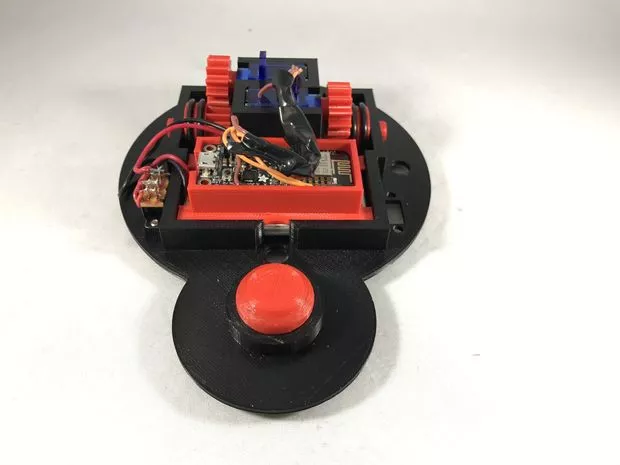


Процесс сборки показан на рисунках выше. Прикрепите два каждого из уплотнительных колец к каждому из «Gear Wheel.stl», как показано на рисунке. Прикрепите один узел шестерни («Gear Wheel.stl» плюс два O-образных кольца) к «Chassis.stl», используя один «Axle Gear Wheel.stl». Повторите процесс с оставшимся узлом шестерни и осью.
Прикрепите один «Gear Servo.stl» к одному из сервоприводов с помощью винта, поставляемого с сервомеханизмом. Эта сборка должна оставаться герметичной, поэтому при необходимости используйте свой любимый клей. Повторите процесс с помощью оставшегося сервопривода. Вставьте левый сервопривод в левый слот сервопривода в корпусе, как показано на рисунке. Вставьте правый сервопривод в правый слот сервопривода в корпусе.
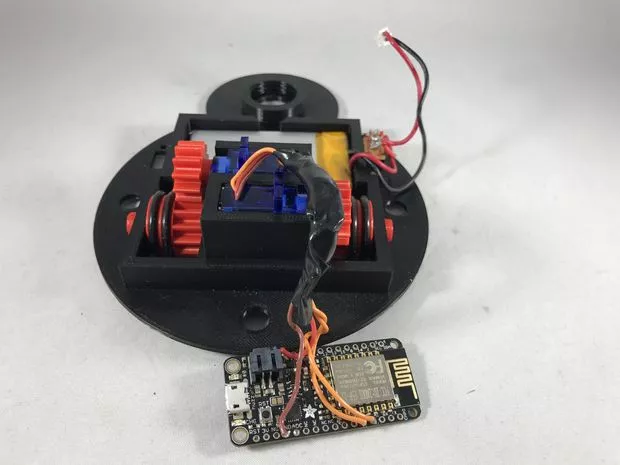
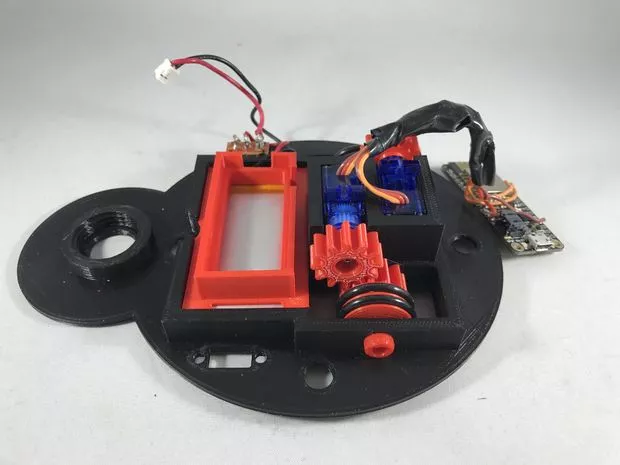
Поместите батарею в отсек аккумулятора шасси. Закрепите скользящий переключатель на шасси с помощью небольших винтов или клея.Поместите «Battery Cover.stl» на аккумулятор, как показано на рисунке. Оберните проволочный пучок между сервоприводами и платой с помощью электрической ленты, затем поместите микроконтроллер в крышку батарейного отсека.
Поместите шарикоподшипник в шасси и зафиксируйте его с помощью «Шарикоподшипника Cap.stl». Не затягивайте, так как шаровой подшипник должен легко вращаться в шасси. Прикрепите штекер удлинителя кабеля micro usb в Huzzah ESP8266, как показано на рисунке. Закрепите конец шасси с помощью прилагаемых винтов. Используя четыре «Bolt.stl», прикрепите корпус Божьей коровки к шасси.
Шаг 5: Результат
Включите игрушку, используя переключатель. Переключатель, который мы использовали, является центральным выключателем, поэтому его перемещение в любое из положений включает игрушку.
Подключитесь к LadyBuggy с помощью устройства iOS и выбранного вами метода, как описано на шаге "Программное обеспечение".
На дисплее iOS сдвиньте красную кнопку в направлении верхней части дисплея для движения вперед, в направлении нижней части дисплея для обратного движения и влево или вправо для перемещения влево или вправо. Надеемся, вам понравится!
Шаг 6: Итоговое видео
Что у нас получилось и процесс управления вы можете посмотреть на видео ниже.