Делаем мини-манипулятор руки робота на основе двух сервоприводов, джойстика и платы Arduino Uno.
Комплектующие
Для нашего вводного урока по робототехнике нам понадобятся следующие детали.
- SG90 Micro-servo motor × 2
- Arduino UNO & Genuino UNO × 1
- Аналоговый джойстик (на выбор) × 1
- Макетная плата × 1
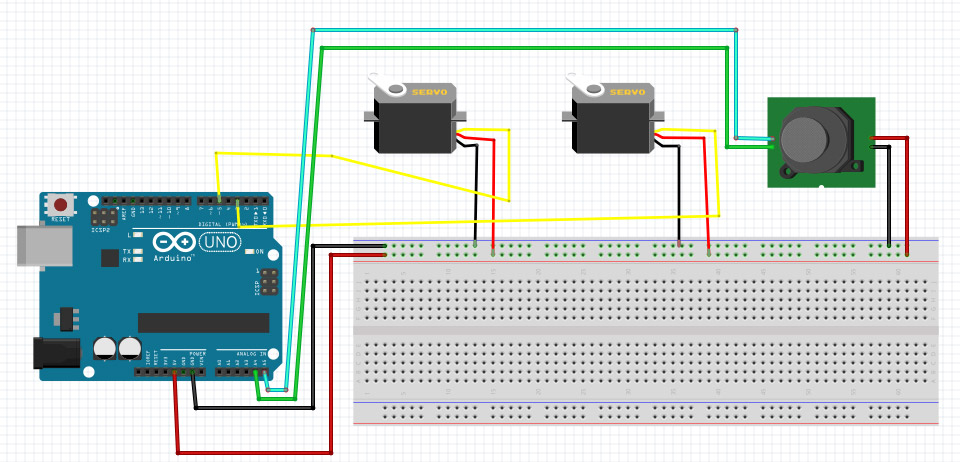
Схема соединения
Соберите все комплектующие нашего проекта манипулятора руки робота согласно схеме ниже:
У вас должно получиться примерно так в итоговом варианте.

Скетч проекта
Скопировать скетч (или эскиз) для нашей руки робота вы можете ниже.
Не забудьте предварительно установить библиотеку для сервопривода, которую можно скачать по этой ссылке.
// добавляем серво-библиотеку
#include <Servo.h>
// определяем наши сервоприводы
Servo servo1;
Servo servo2;
// определяем пины джойстика (аналог)
int joyX = 0;
int joyY = 1;
// переменная для чтения значений из аналоговых выводов
int joyVal;
void setup ()
{
// соединяем сервоприводы с контактами PWM 3-5
servo1.attach(3);
servo2.attach(5);
}
void loop ()
{
// читаем значения джойстика (между 0-1023)
joyVal = analogRead(joyX);
joyVal = map(joyVal, 0, 1023, 0, 180); // величина серво между 0-180
servo1.write(joyVal); // установить положение сервопривода в соответствии со значением джойстика
joyVal = analogRead(joyY);
joyVal = map (joyVal, 0, 1023, 0, 180);
servo2.write(joyVal);
delay(15);
}
Итоговый результат
Если что-то не работает, попробуйте изменить положение сервоприводов. В данном случае нижний подключен к D5.
На этом всё. Скоро больше новых интересных проектов.
Адаптированный перевод статьи Mini robotic arm. Мнение редакции может не совпадать с мнением автора оригинальной публикации.