ArdСистема автополива автоматизирует работу по уходу за комнатным цветком. В тематических магазинах продают такую конструкцию по безбашенной цене. Однако вещь стоящая, так как машина самостоятельно регулирует «порции» влаги для растения.
В этой статье читателю предлагается создать собственный автополив на arduino. Микроконтроллер в данном случае выступает системой управления периферийных устройств.

Необходимые инструменты и периферия для реализации проекта «Автополив» на базе микроконтроллера Arduino
Ирригатор – устройство, контролирующее влажность почвы. Приспособление передает данные на датчик влажности, который укажет сконструированному автополиву на начало работы. Для составления программы используется язык программирования С++.
Таблица с требуемыми материалами:
| Компонент | Описание |
| Микроконтроллер Arduino Uno | Платформа соединяет периферийные устройства и состоит из 2 частей: программная и аппаратная. Код для создания бытовых приборов программируется на бесплатной среде – Arduino IDE.
Чтобы составить и внедрить программу на микроконтроллер, необходимо приобрести usb-кабель. Для автономной работы следует купить блок питания на 10 В. На платформе располагаются 12 пинов, роль которых заключается в цифровом вводе и выводе. Пользователь индивидуально выбирает функции каждого пина. |
| USB-кабель | Обязателен в конструировании системы «автополив на ардуино» для переноски кода. |
| Плата для подключения сенсора – Troyka Shield | С помощью платы подключается сенсорная периферия посредством обычных кабелей. По краям располагаются контакты по 3 пина - S + V + G. |
| Нажимной клеммник | Служит фиксатором для пучковых проводов. Конструкция фиксируется с помощью кнопки на пружине. |
| Блок питания, оснащенный usb-входом
Анализатор влажности почвы |
Идеальное средство для подключения платформ. В конструкции предусмотрен фонарик, который говорит о начале работы.
Приспособление подает сигналы, если почва чрезмерно или недостаточно увлажнена. Подключение к плате производится с помощью 3 проводков. ● MAX глубины для погружения в землю – 4 см; ● MAX потребление электроэнергии – 50 мА; ● Напряжения для питания – до 4 В. |
| Помпа с трубкой для погружения в воду | Управление осуществляется с помощью коммутатора. Длина кабеля достигает 2 метров. |
| Силовой ключ | Создан для замыкания и размыкания электрической цепи. Если использовать приспособление при конструировании автополива ардуино, не потребуется дополнительных спаек. Подключение к основной панели осуществляется также 3 проводами. |
| Соединительный провод – «отец-отец» | Несколько проводов соединяют периферийные устройства. |
| Соединительный провод – «мать-отец» | Проводки также соединяют устройства периферии. |
| Комнатный цветок | Система пригодна для разного типа комнатных растений. |
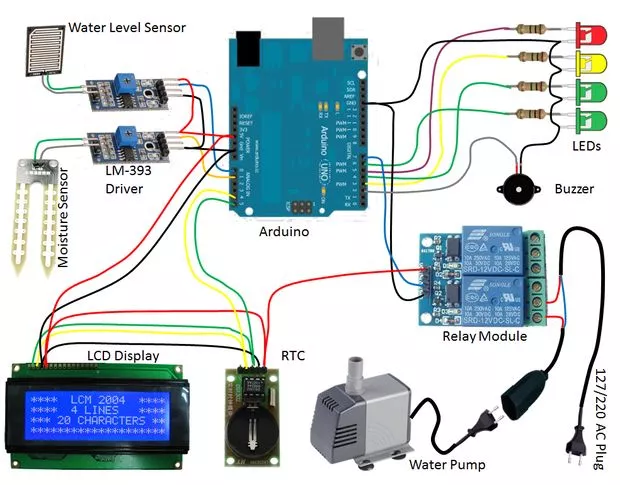
Схема подключения и алгоритм работы в проекте «Автополив» на базе мк Arduino
Ниже представлен алгоритм и схема подключения проекта на платформе arduino. Автополив строится следующим образом:
- Помещаем плату для сенсора на микроконтроллер.
- Подключаем анализатор влажности с помощью платы, описанной выше, к аналогичному пину – А0.
- Присоединяем сенсор к микроконтроллеру:
- Контакт CS подключается к пину № 9 на плате.
- Дисплейные контакты SPI соединяются с соответствующим разъемом на той же плате.
- Силовой ключ вставляем в пин №4.
- Коммутатор подводим к силовому ключу в разъемы, обозначаются буквами p+, p-.
- Теперь подключаем водяную помпу с трубкой с помощью клеммника в контакты с буквами l+ и l-. Постепенно перед конструирующим человеком построится схема.
- Втыкаем сенсорную панель, анализирующую влажность, в горшок с цветком.
- Конец трубки вставляем с водой в почву. В случае, если растение вместе с горшком по весу не превышает 2 кг, закрепляем шланг отдельно. Иначе водяная капель может опрокинуть цветок.
- Опускаем водяную помпу в бутылку, наполненную водой.
- Подключаем конструкцию к электрическому питанию.
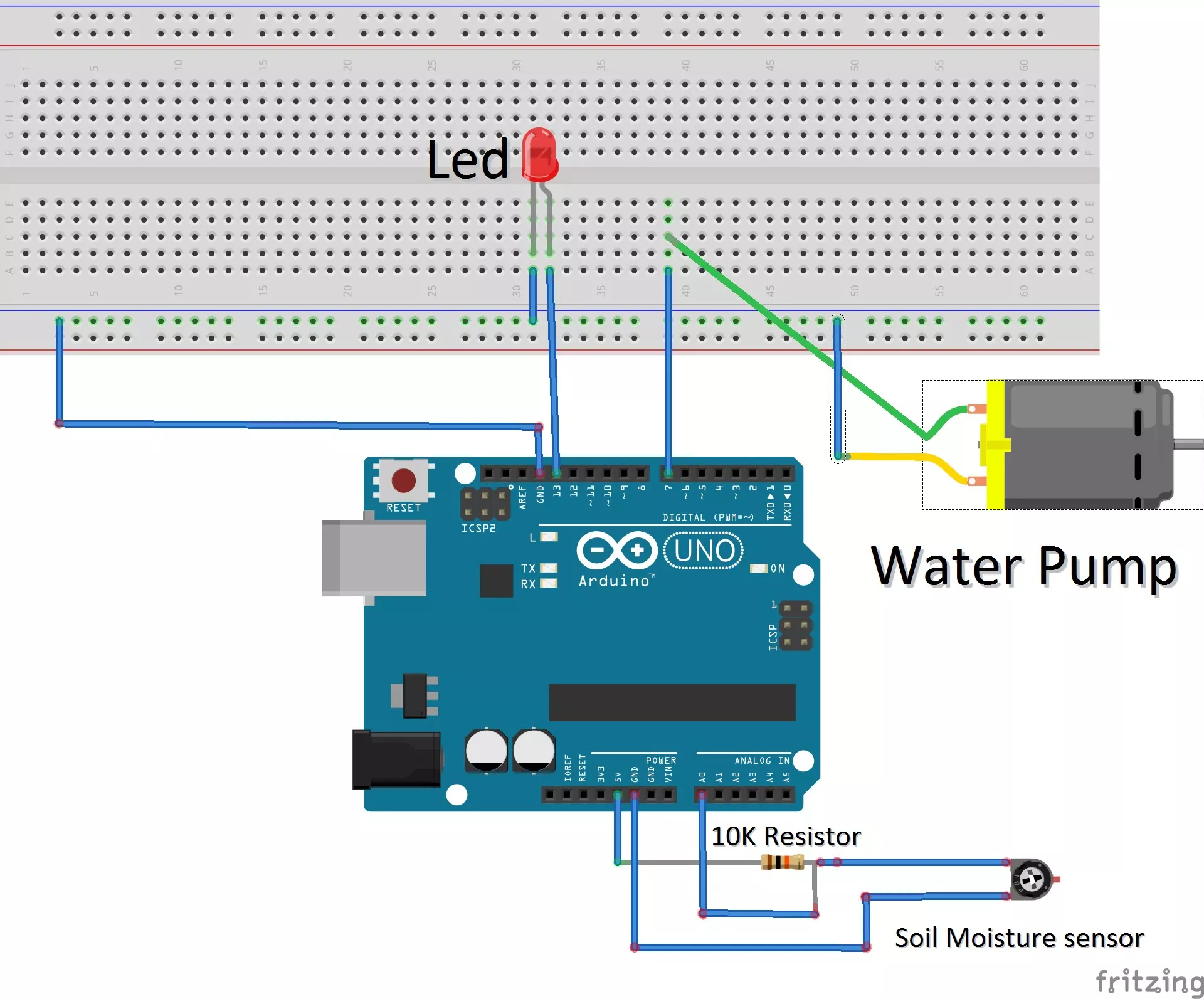
Ниже предлагаем вам две альтернативные схемы для нашего устройства:
Датчик анализирует статус влажности путем определения кислотности земли. Перед вставкой ирригатора в систему необходимо протестировать и откалибровать оборудование:
- Записываем сведения, выведенные на дисплей. При этом сенсор воткнут в сухой горшок. Это обозначается, как min влажности.
- Поливаем землю с растением. Ждем, когда вода до конца пропитает почву. Тогда показания на сенсорном экране покажут один уровень. Необходимо записать полученные сведения. Это значит max влажности.
- В записном блокноте фиксируем константы HUM_MIN и HUM_MAX тем значением, которое было получено в результате калибровки. Прописываем значения в программе, которую переносим затем на микроконтроллер.
Выше описано конструирование автополива для одного цветка. Однако у любителей комнатных растений дом обставлен горшками с цветами. С одной стороны такой вопрос кажется сложным: необходимо подключить несколько помп и анализаторов увлажнения почвы. Но существует более дешевое и простое решение по конструированию автополива.
В шланге от помпы проделываются 25 сантиметровые отверстия с помощью шила. В полученные дырочки втыкаются кусочки стержней ручек шарикового формата. В итоге получается:
- горшки с растениями выстраиваются в ряд на подоконнике;
- трубка устанавливается на цветочный горшок так, чтобы вода из каждого отверстия лилась в отдельный горшок;
- вуаля: изобретение одновременно поливает все растения.
Пользователь самостоятельно выбирает время для полива, но только для одного цветка. Нередко цветки по массе и размерам одинаковы. Следовательно, почва в горшках сохнет за одинаковое время. Для этого придуман метод комбинации: количество горшков делится по группам равного веса и размера.
Пример кода для Arduino для проекта «Автополив»
Переходим к программированию кода:
//Скачиваем библиотеку для работы дисплея и подключаем к программе
#include "QuadDisplay2.h";
//Создаем константу, обозначающую контакт, к которому подключена водяная //помпа
#define VODPOMPA_PIN 4;
// Создаем константу, обозначающую контакт, к которому подключили //анализатор влаги земли
#define HUM_PIN A0;
//Min по влажности
#define HUM_MIN 200;
// Max по влажности
#define HUM_MAX 700;
//Время между проверками полива
#define INTER 60000 * 3;
//Объявляем переменную, в которой будет храниться значение влажности
unsigned int hum = 0;
//В этой переменной будем хранить временной промежуток
unsigned long Time = 0;
// Объявляем объект из класса QuadDisplay, затем передаем номерной знак //контакта CS
QuadDisplay dis(9);
//Создаем метод, отвечающий за работу дисплея
void setup(void)
{
//Запуск метода
begin();
// Объявляем функцию, которая будет отвечать за выход водяной помпы из //контакта
pinMode(VODPOMPA_PIN, OUTPUT);
//На дисплее загорается число - 0
dis.displayInt(0);
}
//Создаем метод, отвечающий за показатель влажности на данный момент void loop(void)
{
//Рассчитываем показатель увлажнения на данный момент
int humNow = analogRead(HUM_PIN);
// Если значение показателя не равно предыдущему, то...
if(humNow != hum) {
//Сохраняем полученные сейчас значение
hum= humNow;
//Вывод значения на экран
displayInt(humNow);
}
//Задаем условия: если прошел заданный пользователь промежуток времени и //статус влаги в почве меньше необходимого, то...
if ((Time == 0 || millis() - Time > INTER) && hum < HUM_MIN ) {
// Даем сигнал о начале работы водяной помпы
digitalWrite(VODPOMPA_PIN, HIGH);
//Объявляем потом, длящийся 2 секунды
delay(2000);
// Завершаем работу помпы
digitalWrite(POMP_PIN, LOW);
// Ставим в значение переменной Time текущее время и добавляем 3 минуты
Time = millis();
}
}
Дополнительно вы можете посмотреть пару интересных видео от наших коллег:
На этом на сегодня всё. Отличных вам проектов!