В этом уроке вы узнаете, как управлять с помощью Ардуино шаговым двигателем, который был взят от старого принтера.

Шаг 1. Что такое шаговый двигатель?
Шаговый двигатель состоит из двух основных частей: ротора и статора.

Ротор является частью двигателя, который фактически вращается и обеспечивает работу. Статор представляет собой неподвижную часть двигателя, в котором размещается ротор. В шаговом двигателе ротор представляет собой постоянный магнит. Статор состоит из нескольких катушек, которые действуют как электромагниты, когда через них проходит электрический ток. Электромагнитная катушка заставит ротор выровняться вместе с ним при зарядке. Ротор приводится в движение путем чередования тока на катушках, протекающий через них.
Шаговые двигатели имеют ряд преимуществ. Они дешевы и просты в использовании. Когда ток не поступает в двигатель, ничего не происходит. Шаговые двигатели также могут вращаться без ограничений и изменять направление в зависимости от установленной полярности.
Шаг 2: Список деталей







Необходимые детали для проекта Ардуино шагового двигателя:
- Шаговый двигатель (этот двигатель был взят от старого принтера)
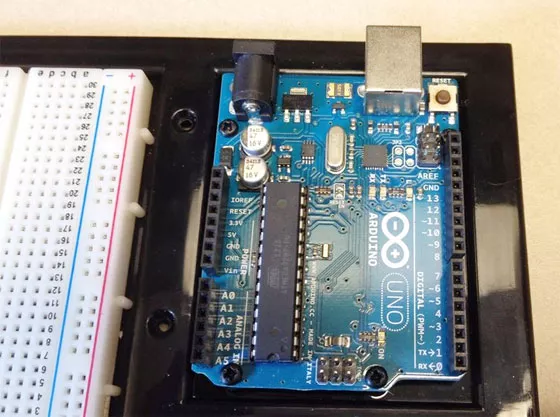
- Arduino
- Изолированный медный провод
- Проволочные резаки / стрипперы
- Регулятор тока
- транзистор
- драйвер двигателя H-Bridge 1A
- моторный шилд
Дополнительные детали:
- паяльник
- припой
- инструменты
- безопасные очки
Шаг 3: Присоединяем провода



Большинство шаговых двигателей имеют четыре провода, поэтому вам нужно будет обрезать четыре медных провода (обратите внимание, что цвет не коррелирует с чем-либо конкретным (обычно есть правило, что черный - это земля, но не сейчас). Различные цвета были использованы только для облегчения понимания. Эти выводы будут использоваться для управления, какая катушка в настоящее время активна в двигателе. Для этого проекта Ардуино шаговый двигатель был взят от старого принтера, поэтому пайка проводов была самым простым вариантом для этого проекта. В любом случае, вы можете безопасно установить соединение (пайка, штекер, клипы).
Шаг 4: Эскиз/скетч Arduino


Arduino уже имеет встроенную библиотеку для шаговых двигателей. Просто перейдите в меню:
Файл → Примеры → Шаговые → stepper_oneRevolution
File → Examples → Stepper → stepper_oneRevolution
Затем вам нужно изменить переменную stepsPerRevolution, чтобы она соответствовала вашему конкретному двигателю. После просмотра номера деталей двигателей в Интернете наш конкретный двигатель был рассчитан на 48 шагов для завершения одного оборота.

То, что на самом деле делает библиотека Stepper - чередует сигналы HIGH и LOW для каждой катушки, как показано в анимации выше.
Шаг 5: Что такое мост H-bridge?


H-Bridge - схема, состоящая из 4 переключателей, которые могут безопасно управлять двигателем постоянного тока или шаговым двигателем. Эти переключатели могут быть реле или (чаще всего) транзисторами. Транзистор представляет собой твердотельный переключатель, который можно закрыть, посылая небольшой ток (сигнал) на один из его контактов.
В отличие от одного транзистора, который позволяет вам контролировать скорость двигателя, H-мосты позволяют вам также контролировать направление вращения двигателя. Он делает это, открывая различные переключатели (транзисторы), чтобы ток тек в разных направлениях и, таким образом, изменяя полярность на двигателе.
H-Bridges может помочь вам предотвратить перегорания вашего Arduino моторами, которыми вы пользуетесь. Двигатели являются индукторами, а это означает, что они хранят электрическую энергию в магнитных полях. Когда ток больше не посылается двигателям, магнитная энергия возвращается в электрическую энергию и может повредить компоненты. H-Bridge помогает изолировать ваш Arduino лучше всего. Вы не должны подключать двигатель непосредственно к Arduino.
Хотя H-Bridges можно легко сделать самому многие предпочитают покупать H-Bridge (например, чип L293NE / SN754410) из-за удобства. Это чип, который мы будем использовать в этом уроке. Физические номера контактов и их назначение ниже:
- Пин 1 (1, 2EN) → Мотор 1 Включен/Выключен (HIGH/LOW)
- Пин 2 (1A) → Мотор 1 логический выход 1
- Пин 3 (1Y) → Мотор 1 терминал 1
- Пин 4 → Земля
- Пин 5 → Земля
- Пин 6 (2Y) → Мотор 1 терминал 2
- Пин 7 (2A) → Мотор 1 логический выход 2
- Пин 8 (VCC2) → Питание для двигателей
- Пин 9 → Мотор 2 Включен/Выключен (HIGH/LOW)
- Пин 10 → Мотор 2 логический выход 1
- Пин 11 → Мотор 2 терминал 1
- Пин 12 → Земля
- Пин 13 → Земля
- Пин 14 → Мотор 2 терминал 2
- Пин 15 → Мотор 2 логический выход 2
- Пин 16 (VCC1) → Питание для H Bridge (5В)
Шаг 6: Схема соединения
Схема соединения нашего проекта Ардуино шагового двигателя ниже.




Для шагового двигателя Ардуино 4 вывода на H-Bridge должны подключаться к 4 выводам двигателя. Затем 4 логических вывода подключаются к Arduino (8, 9, 10 и 11). Как показано на диаграмме выше, для питания двигателей можно подключить внешний источник питания. Чип может обрабатывать внешний источник питания от 4,5 до 36 В (мы выбрали батарею 9В).
Шаг 7: Загрузка кода и тестирование
Загрузите свой код в Ардуино. Если вы запустите свой код и все сработает так, как ожидалось, это потрясающе! Если провода вставлены в неправильные контакты, двигатель просто вибрирует, а не полностью вращается. Играйте со скоростью и направлением двигателя, как сочтете нужным.
На этом всё, теперь у вас должен быть рабочий шаговый двигатель Arduino. То, что вы сделаете дальше, зависит только от вас.
19 февраля 2021 в 23:17
А можно вместо H-моста использовать драйвера для шаговых двигателей (4988 или 8825)?