Сервопривод Ардуино - устройство с мотором, которое можно повернуть на определенный угол и оставить в этом положении на определенное время.
О сервоприводах
Сервопривод Ардуино (англ. - arduino servo) - устройство с электрическим мотором, которое можно повернуть на определенный угол и оставить в этом положении на определенное время.
Сервомоторы Ардуино по сути своей отличные устройства, которые могут поворачиваться в указанное положение и могут применяться в огромном количестве областей. Особенно сейчас их чаще всего применяют в робототехнике.
Обычно у них есть выходной вал, который может поворачиваться на 180 градусов. Используя Arduino мы можем задать сервомотору определенное положение в которое он перейдет.
Изначально сервоприводы начали использовать еще задолго до появления Ардуино, скажем так, в мире пультов дистанционного управления (RC), как правило, для управления рулевым колесом игрушечных машинок или крыльями самолетов. Со временем они нашли свое применение в робототехнике, автоматизации и, конечно же, в мире Ардуино.
В нашем материале мы увидим как подключить сервопривод Ардуино, а затем как управлять этим полезным механизмом и поворачивать его в определенные положения.
Как это работает

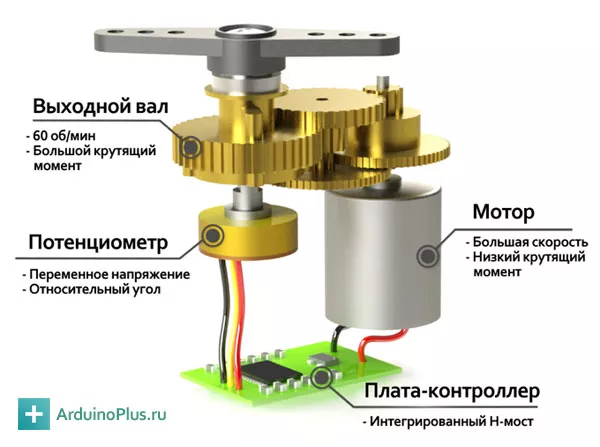
Сервоприводы Arduino - это умные устройства. Используя только один входной пин, они получают значения для позиционирования от микроконтроллера и переходят в это положение. Как можно увидеть на рисунке в самом начале статьи внутри они имеют двигатель и цепь обратной связи, которая гарантирует, что вал/рычаг сервопривода достигнет желаемого положения.
Но какой сигнал сервомоторы получают на входе? Это прямоугольная волна, подобная PWM (англ. - pulse-width modulation, широтно-импульсная модуляция). Каждый цикл в сигнале длится 20 миллисекунд, и большая часть времени в значении LOW. В начале каждого цикла значение сигнала становится HIGH на время от 1 до 2 миллисекунд.
При 1 миллисекунде она составляет 0 градусов, а при 2 миллисекундах - 180 градусов, а в промежутке значение от 0 до 180. Это очень хороший и надежный метод. График выше упрощает понимание.
Комплектующие
Нам понадобятся следующие детали:
- Плата Arduino (подключенная к компьютеру через USB), подойдет Arduino Uno;
- Сервопривод;
- Перемычки.
В мире сервомоторов мало известных брендов. Как пример, можно взять Hitec и Futaba, которые являются ведущими производителями сервоприводов для RC-моделей. Но в целом найти подходящий на АлиЭкспресс и подобных сайтах не сложно.
Подключение сервопривода к Ардуино
Схема подключения ниже:

Сервомотор имеет много встроенных деталей: двигатель, цепь обратной связи и, самое главное, драйвер мотора. Ему просто нужно дополнительно питание, земля и один контрольный пин. Ниже шаги для подключения сервопривода к Arduino, но вы можете всегда свериться с изображением выше.
- Подключите Землю к GND Arduino.Сервомотор имеет гнездовой разъем с тремя контактами. Самый темный или даже черный - это обычно земля.
- Подключите кабель питания, который по всем стандартам должен быть красным к 5В на Ардуино.
- Подключите оставшийся контакт разъема сервопривода к цифровому выходу на Arduino.
Также ниже приводим пример подключения двигателя и Arduino Diecimilia. Фото найдено на официальном сайте производителя микроконтроллеров.


Для этого варианта подключение следующее:
- Подключите красный от сервопривода к +5 В на ардуине.
- Подключите черный/коричневый от сервопривода к Gnd на ардуино.
- Подключите белый/оранжевый от сервопривода к аналоговому 0 на arduino.
Скетч для сервопривода Ардуино
Скетч ниже заставит сервопривод переместиться в позицию 0 градусов, подождать 1 секунду, затем повернуться на 90 градусов, подождать еще одну секунду, после повернуться на 180 градусов и перейти в первоначальное положение.
Также дополнительно мы используем библиотеку servo - скачайте ниже или в нашем разделе Библиотеки.
Содержимое zip-файла размещается в папку arduino-xxxx/hardware/liraries.
Скетч № 1
// Подклоючаем библиотеку Servo
#include <Servo.h>
// Пин для сервопривода
int servoPin = 3;
// Создаем объект
Servo Servo1;
void setup() {
// Нам нужно подключить сервопривод к используемому номеру пина
Servo1.attach(servoPin);
}
void loop(){
// 0 градусов
Servo1.write(0);
delay(1000);
// 90 градусов
Servo1.write(90);
delay(1000);
// 180 градусов
Servo1.write(180);
delay(1000);
}
Если сервомотор подключен к другому цифровому контакту, просто измените значение servoPin на значение используемого цифрового вывода.
Наш код просто объявляет объект и затем инициализирует сервопривод с помощью функции servo.attach(). Мы не должны забывать подключать серво библиотеку. В цикле мы устанавливаем сервопривод на 0 градусов, ждем, а затем устанавливаем его на 90, а затем на 180 градусов.
Скетч № 2
Второй скетч для варианта с Arduino Diecimilia ниже.
Нам достаточно будет скачать и подключить библиотеку из архива:
Сам код такой:
#include <Servo.h>
Servo servo1; Servo servo2;
void setup() {
pinMode(1,OUTPUT);
servo1.attach(14); //analog pin 0
//servo1.setMaximumPulse(2000);
//servo1.setMinimumPulse(700);
servo2.attach(15); //analog pin 1
Serial.begin(19200);
Serial.println("Ready");
}
void loop() {
static int v = 0;
if ( Serial.available()) {
char ch = Serial.read();
switch(ch) {
case '0'...'9':
v = v * 10 + ch - '0';
break;
case 's':
servo1.write(v);
v = 0;
break;
case 'w':
servo2.write(v);
v = 0;
break;
case 'd':
servo2.detach();
break;
case 'a':
servo2.attach(15);
break;
}
}
Servo::refresh();
}
Стандартные методы серво-библиотеки
attach(int)
Соединение пина и сервопривода. Вызывает pinMode. Возвращает 0 при ошибке.
detach()
Отсоединение пина от сервопривода.
write(int)
Установка угла сервопривода в градусах, от 0 до 180.
read()
Возвращает значение, установленное write(int).
attached()
Возвращает 1, если серво в настоящее время подключен.
Дополнительные примеры скетчей
Следующий код позволяет вам контролировать серводвигатель на пине 2 с помощью потенциометра на аналоговом 0.
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
int potpin = 0; // analog pin used to connect the potentiometer
int val; // variable to read the value from the analog pin
void setup()
{
myservo.attach(2); // attaches the servo on pin 2 to the servo object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 179); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
SoftwareServo::refresh();
}
Следующий код - это поворот (пинг/понг) на выводе A0 с переменной скоростью.
#include <SoftwareServo.h>
SoftwareServo myservo; // create servo object to control a servo
#define pinServo A0
int speed = 1;
int limits[2] = {30,150}; // set limitations (min/max: 0->180)
boolean refresh = false; // toggle refresh on/off
void setup()
{
Serial.begin(9600);
// attaches the servo on pin to the servo object
myservo.attach(pinServo);
// init angle of servo inbetween two limitations
myservo.write((limits[1]-limits[0])/2);
}
void loop()
{
// refresh angle
int angle = myservo.read();
// change direction when limits
if (angle >= limits[1] || angle <= limits[0]) speed = -speed;
myservo.write(angle + speed);
// set refresh one time / 2
refresh = refresh ? false : true;
if (refresh) SoftwareServo::refresh();
Serial.print("Angle: ");
Serial.println(angle);
}
Дополнительные возможности
Управление сервоприводами на Ардуино очень простое и мы можем использовать еще несколько интересных фишек.
Контроль точного времени импульса
Ардуино имеет встроенную функцию servo.write(градусы), которая упрощает управление сервомоторами. Однако не все сервоприводы соблюдают одинаковые тайминги для всех позиций. Обычно 1 миллисекунда означает 0 градусов, 1,5 миллисекунды - 90 градусов, и, конечно, 2 миллисекунды означают 180 градусов. Некоторые сервоприводы имеют меньший или больший диапазон.
Для лучшего контроля мы можем использовать функцию servo.writeMicroseconds(микросекунды), которая в качестве параметра принимает точное количество микросекунд. Помните, 1 миллисекунда равна 1000 мкс.
Несколько сервоприводов
Чтобы использовать более одного сервопривода в Ардуино нам нужно объявить несколько серво-объектов, прикрепить разные контакты к каждому из них и обратиться к каждому индивидуально. Итак, нам нужно объявить объекты - столько сколько нам нужно:
// Создаем объекты Servo Servo1, Servo2, Servo3;
Затем нам нужно прикрепить каждый объект к сервомотору. Помните, что каждый сервопривод использует отдельный пин:
Servo1.attach(servoPin1); Servo2.attach(servoPin2); Servo3.attach(servoPin3);
В конце концов, мы должны обращаться к каждому объекту индивидуально:
Servo1.write(0); // Задать для Servo 1 позицию в 0 градусов Servo2.write(90); // Задать для Servo 2 позицию в 90 градусов
Подключение. Земля сервоприводов идёт на GND Arduino, питание на 5В или VIN (в зависимости от входа). И, в конце концов, каждый привод должен быть подключен к отдельному цифровому выводу.
Вопреки распространенному мнению, сервоприводами не нужно управлять через пины PWM - любой цифровой пин подойдет и будет работать.
Управление мышью
Чтобы управлять серво с помощью мыши, вот простой код:
/**
* Servocontrol (derived from processing Mouse 1D example.)
*
* Updated 24 November 2007
*/
// Use the included processing code serial library
import processing.serial.*;
int gx = 15;
int gy = 35;
int spos=90;
float leftColor = 0.0;
float rightColor = 0.0;
Serial port; // The serial port
void setup()
{
size(720, 720);
colorMode(RGB, 1.0);
noStroke();
rectMode(CENTER);
frameRate(100);
println(Serial.list()); // List COM-ports
//select second com-port from the list
port = new Serial(this, Serial.list()[1], 19200);
}
void draw()
{
background(0.0);
update(mouseX);
fill(mouseX/4);
rect(150, 320, gx*2, gx*2);
fill(180 - (mouseX/4));
rect(450, 320, gy*2, gy*2);
}
void update(int x)
{
//Calculate servo postion from mouseX
spos= x/4;
//Output the servo position ( from 0 to 180)
port.write("s"+spos);
// Just some graphics
leftColor = -0.002 * x/2 + 0.06;
rightColor = 0.002 * x/2 + 0.06;
gx = x/2;
gy = 100-x/2;
}
Вам не обязательно использовать этот код, вы также можете отправлять команды на плату arduino с серийного монитора Arduino IDE. Позиция сервопривода от 0 до 180 - это команды 0 и 180 сек соответственно.
В основном этот код берет позицию mouseX (от 0 до 720) и делит на 4, чтобы получить угол для сервопривода (0-180). Наконец, значение выводится на последовательный порт с префиксом 's'.
Примечание: «s» на самом деле должен быть суффиксом, но поскольку это повторяется, это не имеет значения для результата.
Не забудьте сначала проверить с помощью println(Serial.list ()) COM-порт, который следует использовать.
Сервоприводы с непрерывным вращением
Существует специальные типы сервоприводов, обозначенные как сервоприводы непрерывного вращения. В то время как нормальный сервопривод переходит в определенную позицию в зависимости от входного сигнала, сервопривод непрерывного вращения вращается по часовой стрелке или против часовой стрелки со скоростью, пропорциональной сигналу.
Например, функция Servo1.write(0) заставит сервомотор вращаться против часовой стрелки на полной скорости. Функция Servo1.write(90) остановит двигатель, а Servo1.write(180) будет вращать вал по часовой стрелке на полной скорости.
Таким сервоприводам нашли несколько применений, но нужно понимать, что они достаточно медленные. Один из вариантов - микроволновая печь, когда есть необходимость в двигателе для вращения продуктов питания. Но будьте осторожны, микроволны - опасное дело!
26 августа 2020 в 15:47
А у меня одна из шестерëнок покрошилась, поэтому не крутится, подскажите, лучше новый серв купить или шестерëнку новую заказать?
26 августа 2020 в 15:52
Какой сервопривод у вас был?
10 января 2021 в 21:29
Фиговый, видимо.