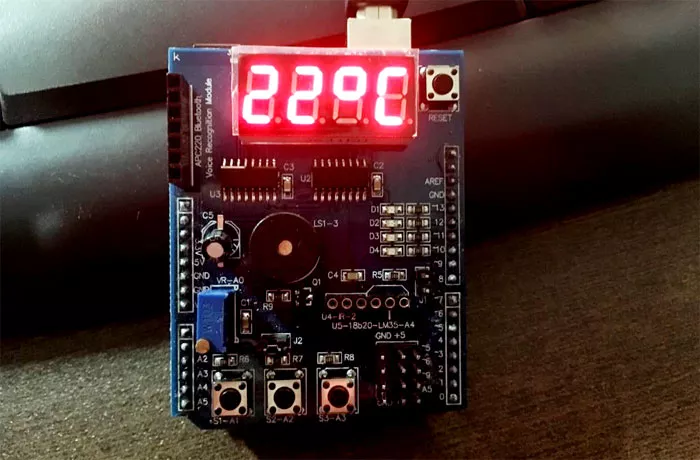
Этот проект представляет собой создание простого инклинометра (угломера) на Ардуино с автоматическим измерением углов наклона в разных плоскостях.
Этот инклинометр можно поворачивать в любом положении, сохраняя читаемость цифр даже перевернув плату вверх ногами. Устройство контролируется Arduino 101 с помощью акселерометров для считывания угла наклона осей X-Y.
Кроме того, есть функция, показывающая температуру окружающей среды в градусах Цельсия или градусах Фаренгейта. Сборка очень проста, и надеемся, вам понравится.

Шаг 1: Список комплектующих
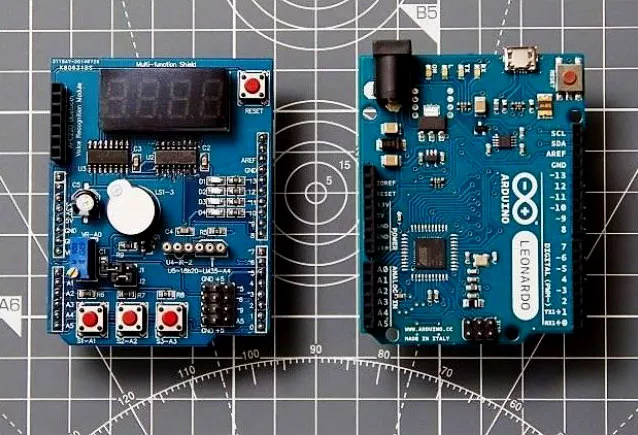

Arduino 101: эта версия Arduino больше не производится, несмотря на наличие интересных функций, таких как датчик температуры, 6-осевой акселерометр, гироскоп, датчик температуры и bluetooth на борту.
Для этого проекта очень полезно избегать внешнего MPU.
Многофункциональный щит (MFD): MFD может упростить и ускорить разработку прототипа. Основные возможности:
- 4-значный 7-сегментный светодиодный дисплейный модуль, управляемый двумя серийными 74HC595
- 4 светодиода для поверхностного монтажа в параллельной конфигурации
- 10K регулируемый прецизионный потенциометр
- 3 независимых кнопки
- Пьезо-зуммер
- Интерфейс датчика DS18B20
- Интерфейс датчика температуры LM35
- Интерфейс инфракрасного приемника
- Контакты последовательного интерфейса для удобного подключения к последовательным модулям, таким как Bluetooth (беспроводной интерфейс), голосовый модуль, модуль распознавания голоса и т.д.
Шаг 2: Сборка
Сборка очень проста и нет необходимости в каких-либо схемах.
Просто вставьте многофункциональный щит в Arduino, заботясь о контактах, чтобы избежать каких-либо повреждений во время вставки.
Шаг 3: Настройка
Для настройки инклинометра Ардуино есть 3 кнопки:
Левая кнопка: выберите рабочий режим.
a) Автоматическая ось. В этом режиме ось (X или Y) для измерения степени наклона автоматически выбирается внутренним гироскопом.
б) Х-ось. Показать только углы оси X.
c) Y-ось. Показать только углы оси Y.
d) Температура - показать температуру окружающей среды в градусах Цельсия или Фаренгейта.
Центральная кнопка: задайте нулевой градус по оси X и Y. Когда выбран температурный режим, эта кнопка устанавливает температурный масштаб (ºC или ºF).
Правая кнопка: Сбросьте оси до исходных углов.
Шаг 4: Функция передачи

Основными функциями кода являются:
- Чтение углов наклона акселерометров.
- Расчет передаточной функции эффекта перевернутой стороны для 7-сегментного светодиодного дисплея.
С углами можно определить пространственное положение устройства, чтобы решить, что показывать (картинка сверху):
- Вид спереди - Инклинометр в первоначальном положении
- Вид спереди - Инклинометр вверх дном
Функция передачи для отображения 7-сегмент (от А до F) работает следующим образом:
От A до D, от B до E, от C до F, от D до A, от E до B, от F до C, от G до G
Для завершения эффекта перевернутости необходимо инвертировать последовательность символов на дисплее:
От: 1, 2, 3, 4
До: 4, 3, 2, 1
Шаг 5: Код
Приложенный ниже код должен применяться только к Arduino 101.
Для другой версии Arduino требуется некоторое обновление кода, а также использование внешнего MPU-6050 для акселерометров.
#define SDA_PORT PORTD
#define SDA_PIN 5
#define SCL_PORT PORTD
#define SCL_PIN 6
#include <CurieTimerOne.h>
#include <CurieIMU.h>
// Module connection pins (Digital Pins)
#define LATCH_PIN 4 // Arduino 101 conection on Pin #4 = Latch of Display Module
#define CLK_PIN 7 // Arduino 101 conection on Pin #7 = Clock of Display Module
#define DATA_PIN 8 // Arduino 101 conection on Pin #8 = Data of Display Module
#define BTN_1_PIN A1
#define BTN_2_PIN A2
#define BTN_3_PIN A3
// Front: Upside Down:
// A D
// ---- ----
// F | | B C | | E
// -G - -G -
// E | | C B | | F
// ---- ----
// D A
//
// Chars Code {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, = , ||, º, C, F}
byte N[] = {0xFC, 0x60, 0xDA, 0xF2, 0x66, 0xB6, 0xBE, 0xE0, 0xFE, 0xF6, 0x28, 0x12, 0xC6, 0x9C, 0x8E};
int delayRefresh;
byte view;
unsigned long ti;
float AcX, AcY, AcZ, gX, gY, gZ;
int uniAngle, dezAngle;
int axis, angle, angleX, angleRefX, angleY, angleRefY, temp;
boolean axisX, axisY, tempStatus, tCelsius;
void setup() {
pinMode(LATCH_PIN, OUTPUT);
pinMode(CLK_PIN, OUTPUT);
pinMode(DATA_PIN, OUTPUT);
pinMode(BTN_1_PIN, INPUT);
pinMode(BTN_2_PIN, INPUT);
pinMode(BTN_3_PIN, INPUT);
pinMode(13, OUTPUT);
digitalWrite(13, HIGH);
CurieTimerOne.start(180000, kbdRead);
CurieIMU.begin();
// Set the accelerometer range to 2G
CurieIMU.setAccelerometerRange(2);
// Set gyro range to 250º/second
CurieIMU.setGyroRange(250);
view = 0; // Front View (regular view as default)
axisX = true;
axisY = false;
angleRefX = 0;
angleRefY = 0;
axis = 0;
tempStatus = false;
tCelsius = true;
}
void loop() {
delayRefresh = 70;
CurieIMU.readAccelerometerScaled(AcX, AcY, AcZ); // Read Accelerometers (G = m/s/s)
CurieIMU.readGyroScaled(gX, gY, gZ); // Read Gyro (º/s)
temp = (CurieIMU.readTemperature() / 512) + 13; // Read the temperature in Celsius degrees (ºC)
if (AcX < 0) {
view = 0; // Front View (regular view)
}
if (AcX > 0) {
view = 1; // Front View (Upside Down)
}
angleX = atan(AcX / AcZ) * 180 / PI - angleRefX;
angleY = atan(AcY / AcZ) * 180 / PI - angleRefY;
if ((abs(gY) > 5) && (abs(gX) < 2) && (axis == 0)) {
axisX = true;
axisY = false;
}
if ((abs(gX) > 5) && (abs(gY) < 2) && (axis == 0)) {
axisX = false;
axisY = true;
}
if (axisX) {
angle = angleX;
}
if (axisY) {
angle = angleY;
}
uniAngle = abs(int(angle)) % 10;
dezAngle = abs(int(angle)) / 10;
// Display the Angle (-XXº) or Temperature (ºC / ºF)
if (tempStatus == false) {
ti = millis(); // Initial time for blinking dot
while ((millis() - ti) < delayRefresh) { // Timer in miliseconds to refresh the display
if (view == 0) { // Front View mode (1)
if (angle < 0) {
displayChars(2, view, 0); // Display Minus Signal "-" at Digi 0
}
displayChars(N[abs(dezAngle)], view, 1); // Display Digit 1
displayChars(N[abs(uniAngle)], view, 2); // Display Digit 2
if (axisY) {
displayChars(N[10], view, 3); // Display Degree Symbol "||" for Y-axis
}
if (axisX) {
displayChars(N[11], view, 3); // Display Degree Symbol "=" for X-axis
}
}
if (view == 1) { // Front Upside Down mode (2)
if (angle < 0) {
displayChars(2, view, 3); // Display Minus Signal "-" at Digit 3
}
displayChars(N[dezAngle], view, 2); // Display Digit 2
displayChars(N[uniAngle], view, 1); // Display Digit 1
if (axisY) {
displayChars(N[10], view, 0); // Display Symbol "||" for Y-axis
}
if (axisX) {
displayChars(N[11], view, 0); // Display Symbol "=" for X-axis
}
}
}
}
if (tempStatus == true) {
if (!tCelsius) { // Temperature conversion - Celsius to Fahrenheit
temp = temp * 9 / 5 + 32;
}
ti = millis(); // Initial time for blinking dot
while ((millis() - ti) < delayRefresh) { // Timer in miliseconds to refresh the display
if (view == 0) { // Front View mode (1)
displayChars(N[temp / 10], view, 0); // Display Digit 0
displayChars(N[temp % 10], view, 1); // Display Digit 1
displayChars(N[12], view, 2); // Display Digit 2 - Symbol "º"
if (tCelsius) {
displayChars(N[13], view, 3); // Display Degree Symbol "C"
}
else {
displayChars(N[14], view, 3); // Display Degree Symbol "F"
}
}
if (view == 1) { // Front View mode (1)
displayChars(N[temp / 10], view, 3); // Display Digit 0
displayChars(N[temp % 10], view, 2); // Display Digit 1
displayChars(N[12], view, 1); // Display Digit 2 - Symbol "º"
if (tCelsius) {
displayChars(N[13], view, 0); // Display Degree Symbol "C"
}
else {
displayChars(N[14], view, 0); // Display Degree Symbol "F"
}
}
}
displayChars(0, 1, 0); // Clear Digit 0
displayChars(0, 1, 1); // Clear Digit 1
displayChars(0, 1, 2); // Clear Digit 2
displayChars(0, 1, 3); // Clear Digit 3
}
}
void displayChars(byte num, byte statusM, byte disp) { // Chars Display Routine
if (statusM == 1) { // Front Upside Down
num = ((num >> 2) << 5) | ((num >> 5 ) << 2) | (num & 2);
}
digitalWrite(LATCH_PIN, LOW);
shiftOut(DATA_PIN, CLK_PIN, LSBFIRST, ~num); // Display number
shiftOut(DATA_PIN, CLK_PIN, LSBFIRST, 128 >> disp); // Set Digit (0-1-2-3)
digitalWrite(LATCH_PIN, HIGH);
}
void kbdRead() { // Push Buttons Reading
if (!digitalRead(BTN_1_PIN)) { // Set mode
axis = (axis + 1) % 4;
if (axis == 0) { // Set mode "auto view" (X & Y axis)
tempStatus = false;
}
if (axis == 1) { // Set mode X-axis only
axisX = true;
axisY = false;
}
if (axis == 2) { // Set mode Y-axis only
axisX = false;
axisY = true;
}
if (axis == 3) { // Set Temperature mode
tempStatus = true;
}
}
if (!digitalRead(BTN_2_PIN) && !tempStatus) { // Set reference for X & Y axis
angleRefX = angleX;
angleRefY = angleY;
}
if (!digitalRead(BTN_2_PIN) && tempStatus) { // Set temperature scale (ºC or ºF) in temperature mode
tCelsius = !tCelsius;
}
if (!digitalRead(BTN_3_PIN) && !tempStatus) { // Reset X & Y axis to original values/reference
angleRefX = 0;
angleRefY = 0;
}
}
Как это работает можно посмотреть в итоговом видео.
На этом всё. Хороших вам проектов.