Нам понравилась последнее время плата Arduino MKRFOX1200, так что мы даже опубликовали большой материал про саму плату и урок "Умный физический почтовый ящик, который отправляет e-mail".
Сегодня мы сделаем GPS Tracker на основе Arduino MKR FOX 1200, который отправляет точный GPS-данные через сеть Sigfox.
Это становится еще актуальней для многих стран в связи усилением контроля за любыми ввозимыми техническими устройствами, а особенно связанными с GPS.
![]()
Шаг 1. Что нам пригодится
Набор деталей для этого урока не велик:
- Arduino MKR Fox 1200 × 1
- Модуль GPS (на выбор, но мы использовали реплику ublox NEO6m (ATGM332D) × 1
- Транзистор общего назначения NPN (мы использовали BC548) × 1
- Резистор 1 кОм × 1
Шаг 2. Информация о проекте
Трекер использует GPS-модуль ATGM332, чтобы получить GPS-положение с большей точностью, чем услуги определения местоположения, предоставляемые Sigfox. Затем данные позиции отправляются как «строка» через сеть Sigfox и, наконец, доставляются по электронной почте.
![]()
Arduino MKR FOX 1200
Плата похожа на Arduino Zero, которая основана на SAM D21 и включает модуль ATA8520 Sigfox. Это плата с низким энергопотреблением, которая поставляется вместе с платой с бесплатной подпиской на один год в сеть Sigfox (до 140 сообщений в день), а также бесплатным доступом к службе геолокации Spot'it.
Дополнительная информация здесь.
GPS-модуль ATGM332
Этот недорогой маломощный GPS-модуль очень хорошо подходит для Arduino MKR FOX 1200, поскольку он работает только с 2,7 В (номинальный 3,3 В).
Первоначально должен был быть куплен модуль NEO6m2, который имеет режим ожидания, но пришлось использовать NEO6. Фактически это был модуль ATGM332. В результате у него не было режима ожидания, поэтому нужно было использовать транзистор для включения модуля GPS, когда это необходимо, и выключить его, чтобы сэкономить аккумулятор. Наша цель - иметь информацию о местоположении довольно редко, то есть 4 сообщения в час, поскольку Sigfox позволяет только 140 сообщений в день.
Мы используем библиотеку TinyGPS (https://github.com/mikalhart/TinyGPS) для декодирования кадров GPS.
Транзисторный переключатель
Нужно было включить и выключить GPS, когда это необходимо. Модули реле слишком громоздки и мощны, если нужно только переключить нагрузку 3 В и несколько миллиампер. Кроме того, для большинства модулей реле требуется 5 В. Таким образом, транзистор будет лучшим решением. Кроме того, MKR FOX 1200 обеспечивает только 7 мА на пине ввода/вывода.
Подойдет транзистор BC548 NPN. Когда нулевой сигнал подается на базу транзистора, он выключается, действуя как открытый выключатель, и ток коллектора не течет. При положительном сигнале, подаваемом на базу транзистора, он становится «включенным», действующим как замкнутый переключатель, и максимальный ток цепи протекает через устройство.
Шаг 3. Схема соединения
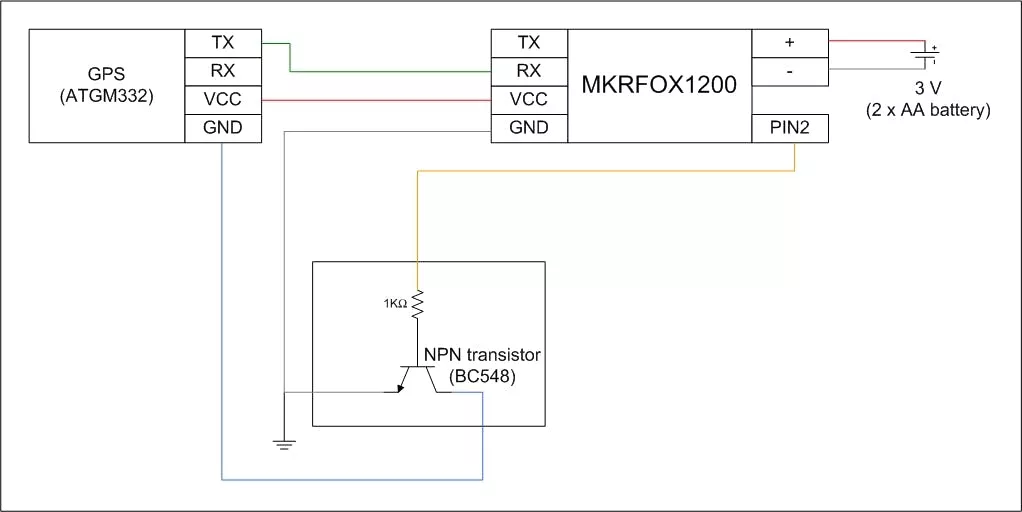
Единственным источником питания являются две 1,5-вольтовых батареи AA, которые питают Arduino MKR FOX 1200. Модуль GPS получает питание от платы Arduino.
Arduino MKR FOX 1200 взаимодействует с модулем GPS, используя второй последовательный порт через контакты 13 и 14, называемые Serial1 в коде. Выход TX-данных модуля GPS подключается к последовательному входу данных (контакт 13) платы Arduino.
Кроме того, плата Arduino использует PIN2 для включения и выключения модуля GPS, как объясняется выше.
Шаг 4. Код проекта
Код нашего проекта вы можете скачать или скопировать ниже:
#include <SigFox.h>
#include <ArduinoLowPower.h>
#include <TinyGPS.h>//incluimos TinyGPS
#define WAITING_TIME 15
#define GPS_PIN 2
#define GPS_INFO_BUFFER_SIZE 128
bool debug = false;
TinyGPS gps;//GPS Object
//GPS data variables
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long chars;
unsigned short sentences, failed_checksum;
char GPS_info_char;
char GPS_info_buffer[GPS_INFO_BUFFER_SIZE];
unsigned int received_char;
bool message_started = false;
int i = 0;
// GPS coordinate structure, 12 bytes size on 32 bits platforms
struct gpscoord {
float a_latitude; // 4 bytes
float a_longitude; // 4 bytes
float a_altitude; // 4 bytes
};
float latitude = 0.0f;
float longitude = 0.0f;
float altitud = 0;
//////////////// Waiting function //////////////////
void Wait(int m, bool s) {
//m minutes to wait
//s slow led pulses
if (debug) {
Serial.print("Waiting: "); Serial.print(m); Serial.println(" min.");
}
digitalWrite(LED_BUILTIN, LOW);
if (s) {
int seg = m * 30;
for (int i = 0; i < seg; i++) {
digitalWrite(LED_BUILTIN, HIGH); //LED on
delay(1000);
digitalWrite(LED_BUILTIN, LOW); //LED off
delay(1000);
}
} else {
int seg = m * 15;
for (int i = 0; i < seg; i++) {
digitalWrite(LED_BUILTIN, HIGH); //LED on
delay(1000);
digitalWrite(LED_BUILTIN, LOW); //LED off
delay(3000);
}
}
}
/////////////////// Sigfox Send Data function ////////////////
void SendSigfox(String data) {
if (debug) {
Serial.print("Sending: "); Serial.println(data);
if (data.length() > 12) {
Serial.println("Message too long, only first 12 bytes will be sent");
}
}
// Remove EOL
//data.trim();
// Start the module
SigFox.begin();
// Wait at least 30mS after first configuration (100mS before)
delay(100);
// Clears all pending interrupts
SigFox.status();
delay(1);
if (debug) SigFox.debug();
delay(100);
SigFox.beginPacket();
SigFox.print(data);
if (debug) {
int ret = SigFox.endPacket(true); // send buffer to SIGFOX network and wait for a response
if (ret > 0) {
Serial.println("No transmission");
} else {
Serial.println("Transmission ok");
}
Serial.println(SigFox.status(SIGFOX));
Serial.println(SigFox.status(ATMEL));
if (SigFox.parsePacket()) {
Serial.println("Response from server:");
while (SigFox.available()) {
Serial.print("0x");
Serial.println(SigFox.read(), HEX);
}
} else {
Serial.println("Could not get any response from the server");
Serial.println("Check the SigFox coverage in your area");
Serial.println("If you are indoor, check the 20dB coverage or move near a window");
}
Serial.println();
} else {
SigFox.endPacket();
}
SigFox.end();
}
////////////////// Convert GPS function //////////////////
/* Converts GPS float data to Char data */
String ConvertGPSdata(const void* data, uint8_t len) {
uint8_t* bytes = (uint8_t*)data;
String cadena ;
if (debug) {
Serial.print("Length: "); Serial.println(len);
}
for (uint8_t i = len - 1; i < len; --i) {
if (bytes[i] < 12) {
cadena.concat(byte(0)); // Not tested
}
cadena.concat(char(bytes[i]));
if (debug) Serial.print(bytes[i], HEX);
}
if (debug) {
Serial.println("");
Serial.print("String to send: "); Serial.println(cadena);
}
return cadena;
}
////////////////////////// Get GPS position function/////////////////////
String GetGPSpositon() {
int messages_count = 0;
String pos;
if (debug) Serial.println("GPS ON");
digitalWrite(GPS_PIN, HIGH); //Turn GPS on
Wait(1, false);
while (messages_count < 5000) {
while (Serial1.available()) {
int GPS_info_char = Serial1.read();
if (GPS_info_char == '$') messages_count ++; // start of message. Counting messages.
if (debug) {
if (GPS_info_char == '$') { // start of message
message_started = true;
received_char = 0;
} else if (GPS_info_char == '*') { // end of message
for (i = 0; i < received_char; i++) {
Serial.write(GPS_info_buffer[i]); // writes the message to the PC once it has been completely received
}
Serial.println();
message_started = false; // ready for the new message
} else if (message_started == true) { // the message is already started and I got a new character
if (received_char <= GPS_INFO_BUFFER_SIZE) { // to avoid buffer overflow
GPS_info_buffer[received_char] = GPS_info_char;
received_char++;
} else { // resets everything (overflow happened)
message_started = false;
received_char = 0;
}
}
}
if (gps.encode(GPS_info_char)) {
gps.f_get_position(&latitude, &longitude);
altitud = gps.altitude() / 100;
// Store coordinates into dedicated structure
gpscoord coords = {altitud, longitude, latitude};
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths);
if (debug) {
Serial.println();
Serial.println();
Serial.print("Latitud/Longitud: ");
Serial.print(latitude, 5);
Serial.print(", ");
Serial.println(longitude, 5);
Serial.println();
Serial.print("Fecha: "); Serial.print(day, DEC); Serial.print("/");
Serial.print(month, DEC); Serial.print("/"); Serial.print(year);
Serial.print(" Hora: "); Serial.print(hour, DEC); Serial.print(":");
Serial.print(minute, DEC); Serial.print(":"); Serial.print(second, DEC);
Serial.print("."); Serial.println(hundredths, DEC);
Serial.print("Altitud (metros): "); Serial.println(gps.f_altitude());
Serial.print("Rumbo (grados): "); Serial.println(gps.f_course());
Serial.print("Velocidad(kmph): "); Serial.println(gps.f_speed_kmph());
Serial.print("Satelites: "); Serial.println(gps.satellites());
Serial.println();
}
gps.stats(&chars, &sentences, &failed_checksum);
if (debug) Serial.println("GPS turned off");
digitalWrite(GPS_PIN, LOW); //GPS turned off
pos = ConvertGPSdata(&coords, sizeof(gpscoord)); //Send data
return pos;
}
}
}
pos = "No Signal";
}
//////////////////SETUP///////////////////
void setup() {
if (debug) {
Serial.begin(9600);
while (!Serial) {}// wait for serial port to connect. Needed for native USB port only
Serial.println("Serial Connected");
}
//Serial1 pins 13-14 for 3.3V connection to GPS.
Serial1.begin(9600);
while (!Serial1) {}
if (debug) {
Serial.println("GPS Connected");
}
pinMode(GPS_PIN, OUTPUT); //pin de interruptor del GPS
if (!SigFox.begin()) {
Serial.println("Shield error or not present!");
return;
}
// Enable debug led and disable automatic deep sleep
if (debug) {
SigFox.debug();
} else {
SigFox.end(); // Send the module to the deepest sleep
}
}
//////////////////////LOOP////////////////////////
void loop() {
String position_data;
position_data = GetGPSpositon();
SendSigfox(position_data);
Wait(WAITING_TIME, false);
}
Шаг 5. Отправка информации GPS через Sigfox
Мы хотел отправить информацию GPS с использованием данных типа float, но когда мы попытались, то всегда получали нулевые значения.
Поиск в Интернете привел на этот проект на GitHub - https://github.com/nicolsc/SmartEverything_SigFox_GPS от Николя Лискони. Он использует AT-команды для отправки любого типа данных и конвертирует 'float' в 'hex'. Тем не менее у Arduino MKR FOX 1200 нет режима AT, и мы не смогли заставить её работать.
Было сделано несколько десятков тестов и, изменив код Николя, был найден способ отправить «строку», которая была проанализирована платформой Sigfox «float: 32», и ее можно было бы использовать напрямую без какого-либо преобразования.
Данные Sigfox ограничены 12 байтами. Данные, которые отправляются в сеть SigFox:
- Широта, float: 32 типа (float:32type), 4 байта.
- Долгота, float: 32 типа (float:32type), 4 байта.
- Высота, float: 32 типа (float:32type), 4 байта.
Шаг 6. Конфигурация обратного вызова Sigfox
Конфигурация пользовательского обратного вызова Sigfox:
lat::float:32lng::float:32 alt::float:32
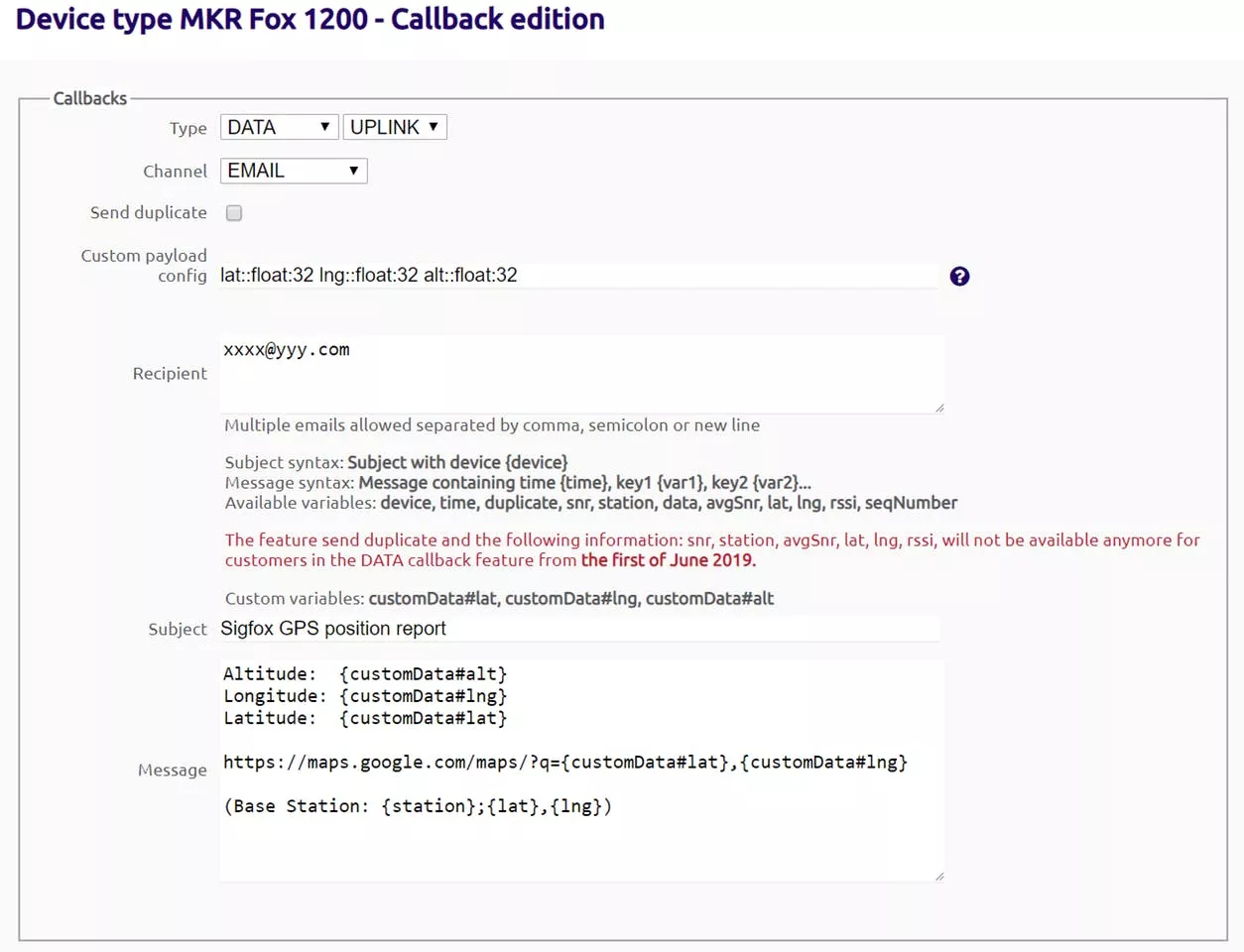
Вы получите электронное письмо:

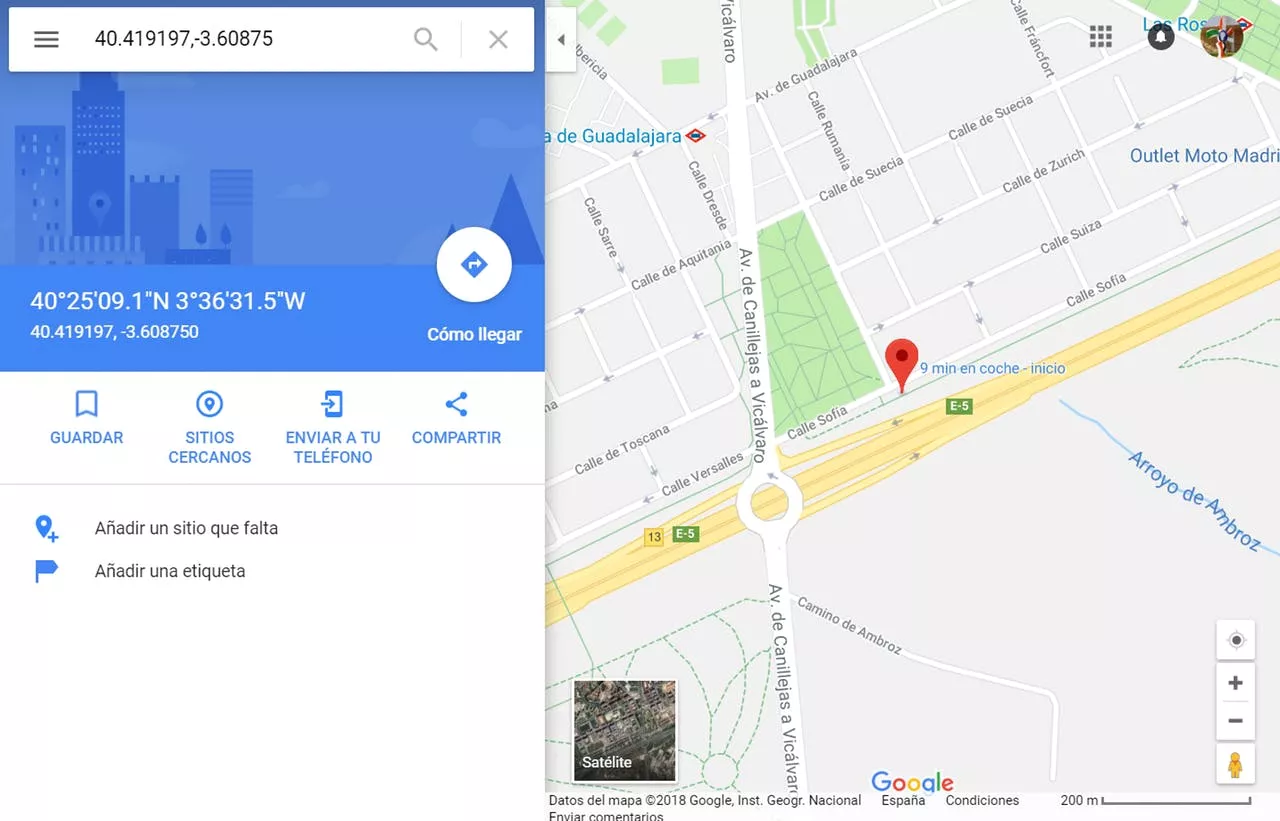
Чтобы легко видеть позицию, мы включили URL-адрес в Карты Google, используя полученную информацию:
https://maps.google.com/maps/?q=%7bcustomData#lat},{customData#lng}
И, наконец, результат работы нашего Arduino GPS-трекера:
На этом всё, желаю вам отличных проектов!